Опубликовано на Яндекс.Дзен
Руководство по эксплуатации

Введение
Настоящее руководство по эксплуатации предназначено для ознакомления обслуживающего персонала с устройством, принципом действия, конструкцией, порядком эксплуатации и обслуживания измерителя-регулятора микропроцессорного ТРМ212 (в дальнейшем по тексту именуемого «ТРМ212» или «прибор» или «прибор ТРМ212»).
Ряд текстовых приложений (приложения Е, Ж, И) к настоящему Руководству вынесены в отдельный документ («Руководство по эксплуатации. Приложения»).
Настоящее Руководство по эксплуатации распространяется на приборы всех модификаций, изготовленных согласно ТУ 4211-011-46526536-2004.
Приборы имеют сертификат об утверждении типа средств измерений RU.C.32.010.А № 24972 и сертификат соответствия № 03.009.0194.
Приборы ТРМ212 могут выпускаться в различных модификациях, отличающихся друг от друга конструктивным исполнением и типом встроенных выходных устройств.
Модификации прибора соответствует следующее условное обозначение:
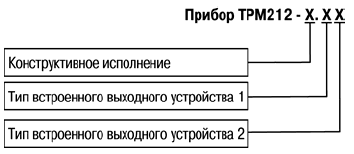
Конструктивное исполнение:
Н - корпус настенного крепления с размерами 130х105х65 мм и степенью защиты корпуса IP44;
Щ1 - корпус щитового крепления с размерами 96х96х70 мм и степенью защиты со стороны передней панели IP54;
Щ2 - корпус щитового крепления с размерами 96х48х100 мм и степенью защиты со стороны передней панели IP54.
Габаритные чертежи корпусов различных типов приведены в Приложении А.
Тип встроенного выходного устройства 1(2):
Р - реле электромагнитное;
К - оптопара транзисторная структуры n-р-n-типа;
С - оптопара симисторная;
И - цифроаналоговый преобразователь «параметр - ток 4...20 мА»;
У - цифроаналоговый преобразователь «параметр - напряжение 0...10 В»;
Т - выход для управления внешним твердотельным реле.
Условные сокращения, используемые в настоящем документе
ТУ - технические условия;
НСХ - номинальная статическая характеристика;
ВУ - выходное устройство;
ТП - термопара;
ТС - термопреобразователь сопротивления;
ТСМ - термопреобразователь сопротивления медный;
ТСП - термопреобразователь сопротивления платиновый;
ЦАП - цифроаналоговый преобразователь;
ПИД - пропорционально-интегрально-дифференциальный (закон или регулятор);
ИМ - исполнительный механизм;
ЦИ - цифровой индикатор;
ПК - персональный компьютер;
PV - измеряемая величина (process value);
SP - уставка регулятора (set point);
LBA - тревога обрыва контура (loop brake alarm).
Соответствие символов ЦИ буквам латинского алфавита:

1. Назначение
Измерителирегуляторы микропроцессорные ТРМ212 предназначены для измерения и автоматического регулирования температуры (при использовании в качестве первичных преобразователей ТС или термоэлектрических преобразователей), а также других физиче ских параметров, значение которых первичными преобразователями (далее – «датчиками») может быть преобразовано в унифицированный сигнал постоянного тока или напряжения.
Информация о любом из измеренных физических параметров отображается в цифровом виде на встроенном четырехразрядном ЦИ.
Приборы могут быть использованы для измерения и регулирования технологических параметров в различных отраслях промышленности, в том числе подконтрольных Ростехнадзору, коммунального и сельского хозяйства.
Прибор позволяет осуществлять следующие функции:
• измерение температуры и других физических величин (давления, влажности, расхода, уровня и т.п.) в двух различных точках с помощью датчиков;
• вычисление квадратного корня из измеряемой величины при работе с датчиками, имеющими унифицированный выходной сигнал тока или напряжения;
• вычисление разности, суммы, отношения и корня из разности двух измеряемых величин;
• ПИД-регулирование измеренной или вычисленной величины в системе с запорнорегулирующим (КЗР) или трехходовым клапаном в автоматическом, ручном и дистанционном режимах;
• коррекцию уставки регулятора в зависимости от внешнего параметра;
• автонастройка ПИДрегулятора на объекте;
• дистанционное управление запуском и остановкой регулирования;
• определение аварийной ситуации при возникновении ошибок на входе и при обрыве в контуре регулирования;
• обмен данными, программирование прибора по сети через интерфейс RS485.
2. Технические характеристики и условия эксплуатации
2.1. Основные технические характеристики приведены в таблицах 1 – 7.
Таблица 1. Питание
|
Характеристика |
Значение |
|
Напряжение питания, В |
90+245 |
|
Частота, Гц |
47+63 |
|
Потребляемая мощность, ВА |
6 |
Таблица 2. Входы
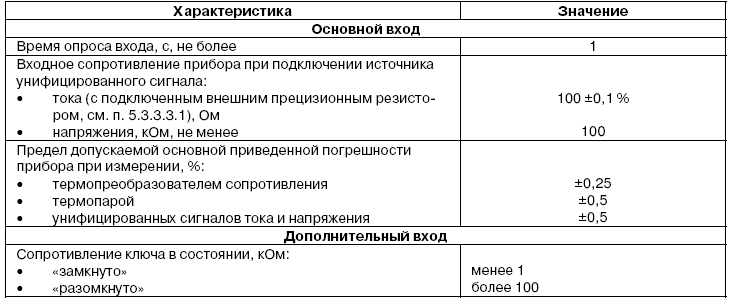
Таблица 3. Датчики и входные сигналы
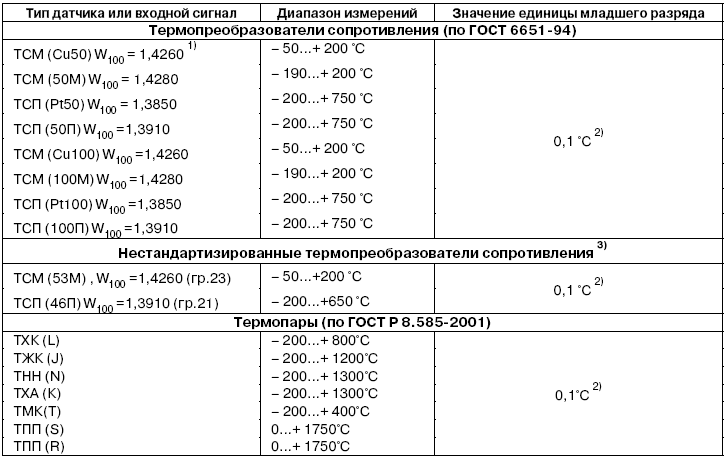
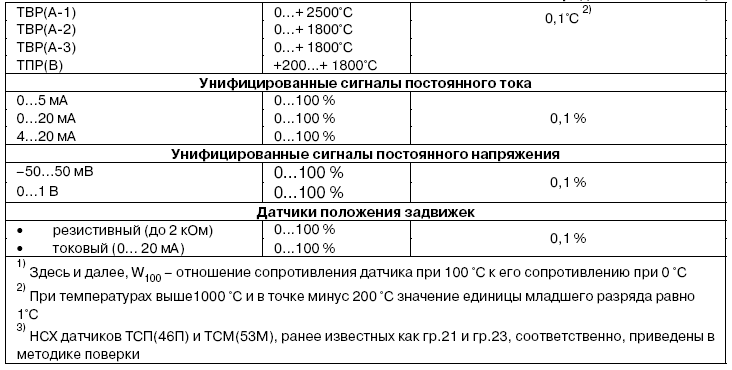
Примечание. Разрешающая способность прибора определяется значением единицы младшего разряда.
Таблица 4. Выходные устройства ключевого типа
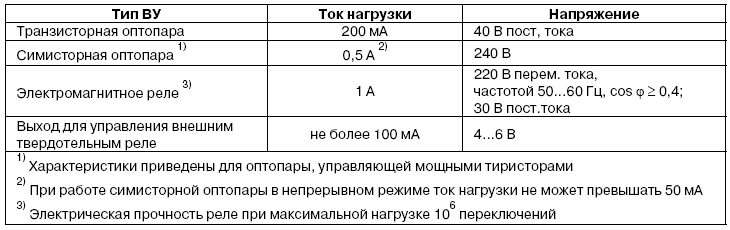
Таблица 5. Выходные устройства аналогового типа
|
Характеристика |
Тип ВУ |
|
|
|
ЦАП |
ЦАП |
|
|
«параметр - напряжение» |
«параметр - ток» |
|
Диапазон выходного сигнала |
0+10 В |
4+20 мА |
|
Дискретность ЦАП, разрядов |
10 |
10 |
|
Сопротивление нагрузки, кОм |
более 2 |
менее 1 |
|
Диапазон напряжения постоянного питания, В |
15...32 |
15...32 |
|
Предел допускаемой основной приве денной погрешности ЦАП, % |
± 0,5 |
± 0,5 |
Таблица 6. Интерфейс связи
|
Наименование |
Значение |
|
Тип интерфейса |
RS-485 |
|
Скорость передачи данных, кбит\с |
2,4; 4,8; 9,6; 14,4; 19,6; 28,8; 38,4; 57,6; 115,2 |
|
Тип кабеля |
экранированная витая пара |
|
Протокол передачи данных |
ОВЕН |
Таблица 7. Характеристики корпусов
|
Наименование |
Корпус |
||
|
|
щитовой Щ1 |
щитовой Щ2 |
настенный Н |
|
Габаритные размеры, мм (без элементов крепления) |
96х96х70 |
96х48х100 |
130х105х65 |
|
Степень защиты корпуса |
IP54* |
IP54* |
IP44 |
|
* Со стороны передней панели |
|||
2.2. Прибор соответствует группе климатического исполнения УХЛ4 по ГОСТ 15150-69 и предназначен для эксплуатации в следующих условиях:
• температура окружающего воздуха: +1...50 °С
• относительная влажность при 35 °С: 30...80 %
• атмосферное давление: 84,0...106,7 кПа
3. Устройство и работа прибора
3.1. Принцип действия
3.1.1. Структурная схема
В процессе работы ТРМ212 производит опрос датчиков, вычисляя по полученным данным текущие значения измеряемых величин, отображает их на ЦИ и выдает соответствующие сигналы на выходные устройства. Структурная схема прибора приведена на рис. 1.
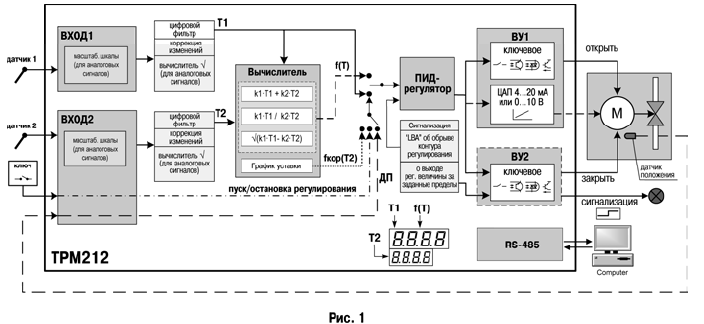
Прибор включает в себя:
• два универсальных входа для подключения датчиков;
• дополнительный вход для дистанционного управления процессом регулирования;
• блок обработки данных, состоящий из цифрового фильтра, вычислителя, ПИД регулятора;
• два выходных устройства;
• интерфейс RS485;
• два ЦИ для отображения регулируемой величины и ее уставки.
3.1.2. Измерительный вход
Порядок установки параметров измерительного входа см. п. 6.2.1.
К измерительному входу можно подключать любой из датчиков, перечисленных в таблице 3.
Для измерения температур следует использовать ТС и термоэлектрические преобразователи (термопары). Для измерения других физических параметров могут быть использованы датчики, оснащенные нормирующими преобразователями этих параметров в унифицированные сигналы постоянного тока 4...20 мА, 0...20 мА, 0...5 мА или напряжения минус 50...50 мВ и 0...1 В.
Особенности подключения датчиков описаны в п. 5.3.3, схемы подключения приведены в Приложении Б.
3.1.3. Дополнительный вход
Порядок установки параметров дополнительного входа описан в п. 6.2.1.1.
3.1.3.1. К дополнительному входу подсоединяют ключ. Ключом осуществляется запуск и остановка процесса регулирования (см. рис. 1).
При замыкании ключа запускается процесс регулирования. При размыкании ключа прибор прекращает процесс регулирования и светится светодиод СТОП.
3.1.3.2. Логическое состояние ключа соответствует его электрическому сопротивлению:
• менее 1 кОм (замкнуто);
• более 100 кОм (разомкнуто).
При несоблюдении этих условий возникает не определенность состояния дополнительного входа.
3.1.4. Цифровой фильтр
Порядок установки параметров цифрового фильтра см. в п. 6.2.2.
3.1.4.1. Для корректной работы прибор необхо димо защищать от различных внешних воздействий и электромагнитных помех. Для этой цели рекомен дуется использовать помехоподавляющий фильтр в цепи питания ТРМ212, а в цепи управления параллельно выходным коммутирующим контак там установить искрогасящие элементы, например RCцепочку. Кроме аппаратной защиты существует возможность использовать программный цифровой фильтр низких частот.
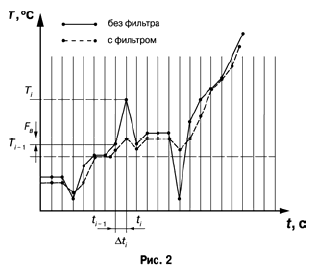
3.1.4.2. Цифровой фильтр подавляет помехи двух видов:
А) Сильные единичные помехи (рис. 2). Если измеренное значение ТI отличается от пре дыдущего TI1 на величину, большую, чем значение FB (заданная «полоса фильтра»), то при бор присваивает ему значение равное TI1 + FB (рис. 2), а полоса фильтра удваивается. Таким образом, характеристика сглаживается. Как видно из рис. 2, малая ширина полосы фильтра приводит к замедлению реакции прибора на быстрое изменение входной величины. Поэтому при низком уровне помех или при работе с быстроменяющимися процессами рекомендуется увеличить значение полосы фильтра или отключить действие этого параметра.
При работе в условиях сильных помех для устранения их влияния на работу прибора необходимо уменьшить значение полосы фильтра.
Б) Шумовые составляющие сигнала, осуществляя его экспоненциальное сглаживание. Основной характеристикой экспоненциального фильтра является постоянная времени  Ф - интервал, в течение которого сигнал достигает 0,63 от значения каждого измерения TI, (рис. 3). При больших значениях Ф фильтр вносит значительное запаздывание, но шумы заметно подавлены (кривая II на рис. 3). При Ф, близких к нулю, фильтр довольно точно отслеживает изменения входного сигнала, но уровень шума практически не уменьшается (кривая I на рис. 3).
Ф - интервал, в течение которого сигнал достигает 0,63 от значения каждого измерения TI, (рис. 3). При больших значениях Ф фильтр вносит значительное запаздывание, но шумы заметно подавлены (кривая II на рис. 3). При Ф, близких к нулю, фильтр довольно точно отслеживает изменения входного сигнала, но уровень шума практически не уменьшается (кривая I на рис. 3).
3.1.4.3. При установке оптимальных значений параметров фильтра (подробнее см. п. 6.2.2) задержка сигнала, вносимая фильтром, не будет оказывать отрицательного влияния на процесс регулирования, при этом сохранится эффективность подавления помех.
.png)
3.1.5. Коррекция результатов измерения
Порядок установки параметров коррекции измерительной характеристики датчика приведен в п. 6.2.1.6. 3.1.5.1. Для устранения начальной погрешности преобразования входных сигналов и погрешностей, вносимых соединительными проводами, измеренное прибором значение может быть откорректировано. В ТРМ212 есть два типа коррекции, позволяющие осуществлять сдвиг или наклон характеристики на заданную величину.
3.1.5.2. Для компенсации погрешностей  R = R0 - R0,TCM, вносимых сопротивлением подводящих проводов RTCM при использовании двухпроводной схемы подключения ТС, к каждому измеренному значению параметра ТИЗМ прибавляется заданное пользователем значение («сдвиг характеристики датчика»). На рис. 4 приведен пример сдвига характеристики для датчика ТСМ(Cu50).
R = R0 - R0,TCM, вносимых сопротивлением подводящих проводов RTCM при использовании двухпроводной схемы подключения ТС, к каждому измеренному значению параметра ТИЗМ прибавляется заданное пользователем значение («сдвиг характеристики датчика»). На рис. 4 приведен пример сдвига характеристики для датчика ТСМ(Cu50).
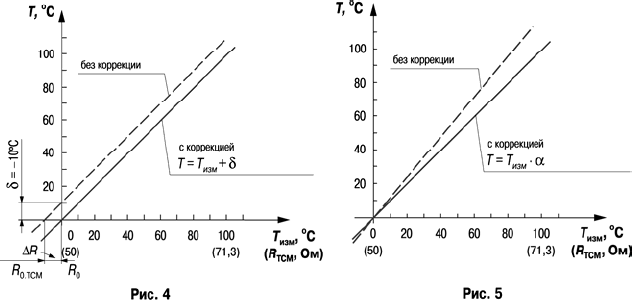
3.1.5.3. Для компенсации погрешностей датчиков при отклонении значения W100 от номинального каждое измеренное значение параметра ТИЗМ умножается на заданный пользователем поправочный коэффициент  («наклон характеристики датчика»). Коэффициент задается в пределах от 0,5 до 2,0. На рис. 5 приведен пример изменения наклона характеристики для датчика ТСМ(Cu50).
(«наклон характеристики датчика»). Коэффициент задается в пределах от 0,5 до 2,0. На рис. 5 приведен пример изменения наклона характеристики для датчика ТСМ(Cu50).
3.1.6. Вычислитель
Порядок установки параметров Вычислителя приведен в п. 6.2.3.1.
3.1.6.1. Вычислитель производит вычисление физической величины по одному или нескольким входным значениям. В приборе ТРМ212 к Вычислителю можно подключить только два источника данных, которыми являются собственные входы прибора.
Вычислитель жестко связан с регулятором. Входным параметром для ПИД-регулятора служат данные с выхода Вычислителя.
3.1.6.2. Вычислитель производит одну математическую операцию с входными величинами:
• Средневзвешенной суммой: (К1 х PV1 + К2 х PV2);
• Отношением (K1 х PV1 / K2 х PV2);
• Квадратным корнем из средневзвешенной взвешенной суммы (  ),
),
где: PV1- величина, измеренная на Входе 1;
PV2 - величина, измеренная на Входе 2;
К1, К2 - весовые коэффициенты Входа 1 и Входа 2.
ТРМ212 с функцией Вычислителя позволяет реализовать наиболее распространенные задачи, например:
• регулирование соотношения (используя операцию вычисления отношения с любыми коэффициентами K1, K2 ),
• вычисление и регулирование разности двух величин (используя операцию вычисления средневзвешенной суммы, K1 = 1, K2 = –1;
• регулирование и измерение расхода с помощью диафрагм, сопел или трубок Вентури (используя операцию вычисления корня из средневзвешенной суммы с коэффициентами K1, K2, рассчитанными по методике, приведенной в Приложении И).
3.1.7. ПИД-регулятор
Порядок установки параметров регулирования приведен в п. 6.2.3.
3.1.7.1. Общие принципы ПИД-регулирования
3.1.7.1.1. ПИДрегулятор вырабатывает управляющий (выходной) сигнал, действие ко торого направлено на уменьшение отклонения текущего значения регулируемой величины от уставки. Выходной сигнал ПИДрегулятора YI рассчитывается по формуле:

где XP - полоса пропорциональности;
Ei - разность между уставкой и текущим значением контролируемой величины PVi, или рассогласование;
 Д - постоянная времени дифференцирования;
Д - постоянная времени дифференцирования;
 EI - разность между двумя соседними измерениями EI и EI-1;
EI - разность между двумя соседними измерениями EI и EI-1;
tИЗМ - время между двумя соседними измерениями PVI и PVI-1;
И - постоянная времени интегрирования;
 - накопленная в i-й момент времени сумма рассогласований (интегральная сумма).
- накопленная в i-й момент времени сумма рассогласований (интегральная сумма).
Как видно из формулы (1), сигнал управления зависит от:
1) Рассогласования EI, которое отвечает за реакцию на мгновенную ошибку регулирования. Отношение EI /XP называется «пропорциональной составляющей» выходного сигнала.
2) Накопленной ошибки регулирования  , которая позволяет добиться максимальной скорости достижения уставки. Выражение
, которая позволяет добиться максимальной скорости достижения уставки. Выражение  называется «интегральной составляющей» выходного сигнала.
называется «интегральной составляющей» выходного сигнала.
3) Скорости изменения рассогласования EI/tИЗМ, которая позволяет улучшить качество переходного процесса. Выражение  называется «дифференциальной составляющей» выходного сигнала.
называется «дифференциальной составляющей» выходного сигнала.
3.1.7.1.2. Для эффективной работы ПИД-регулятора необходимо подобрать для конкретного объекта регулирования значения коэффициентов ПИД-регулятора XP, Д и И. Их можно определить в режиме АВТОНАСТРОЙКА (см. п. 7.1) или подобрать при РУЧНОЙ НАСТРОЙКЕ (п. 7.2).
3.1.7.1.3. При аналоговом управлении выходной сигнал ПИД-регулятора преобразуется в пропорциональный ему ток или напряжение.
При управлении 3_х позиционным ИМ (п. 3.1.9.1) выходной сигнал ПИД_регулятора преобразуется в сигналы «больше», «меньше», «стоп» по следующему принципу:
1) рассчитывается длительность импульса:
tИМП = Y х tПХ, (2)
где: Y = Y(i) - Y(i-1) - приращение выходного сигнала, tПХ - время полного хода задвижки;
2) выдается воздействие на ИМ:
при Y > 0 включается ВУ1 («больше») на время равное tИМП,
при Y < 0 включается ВУ2 («меньше») на время равное tИМП,
при Y = 0 ВУ остаются в прежнем состоянии («стоп»).
3.1.7.2. Прямое и обратное управление
При регулировании выбирают один из методов управления системой: прямое или обратное..
При прямом управлении значение выходного сигнала регулятора увеличивается с увеличением измеряемой величины (рис. 6). При обратном управлении значение выходного сигнала регулятора уменьшается с увеличением измеряемой величины. Например, в системе нагревания по мере роста температуры значение выходного сигнала уменьшается, этот процесс имеет обратное управление.
3.1.7.3. Зона нечувствительности
Для исключения излишних срабатываний регулятора при небольшом значении рассогласования ЕI для вычисления YI по формуле (1) используется уточненное значение ЕP, вычисленное в соответствии с условиями: если | ЕI |  ХD, то ЕP = 0; если ЕI > ХD, то ЕP = ЕI - ХD; если ЕI < -ХD, то ЕP = ЕI + ХD , где ХD - зона нечувствительности (см. рис. 6).
ХD, то ЕP = 0; если ЕI > ХD, то ЕP = ЕI - ХD; если ЕI < -ХD, то ЕP = ЕI + ХD , где ХD - зона нечувствительности (см. рис. 6).
Прибор будет выдавать управляющий сигнал только после того, как регулируемая величина выйдет из этой зоны. Зона нечувствительности не должна превышать необходимую точность регулирования.
3.1.7.4. Скорость изменения уставки
Если значение уставки необходимо изменить в процессе работы, то переход с одного значения на другое можно сгладить, задав «скорость изменения уставки». При скорости изменения уставки отличной от 0, уставка меняется не скачком, а линейно, с заданной скоростью.
В качестве начальной уставки принимается текущее значение регулируемого параметра на момент включения регулятора и каждую минуту уставка регулятора изменяется на величину, заданную в этом параметре.
При использовании ограничения скорости изменения уставки возрастает время выхода на рабочий режим. Поэтому, если задержка приводит к неудовлетворительным результатам, нужно увеличить значение этого параметра или отключить его действие.
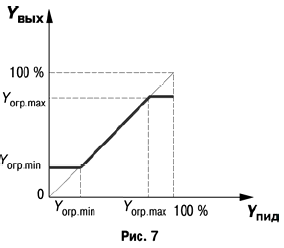
3.1.7.5. Ограничение выходного сигнала
В ТРМ212 можно установить максимальное YОГР.MAX и минимальное YОГР.MIN ограничения выходного сигна ла, которые определяют соответственно минимальную и максимальную степень открытия задвижки (рис. 7).
3.1.7.6. График коррекции уставки Порядок установки параметров графика коррекции уставки описан в п. 6.2.3.1.2.
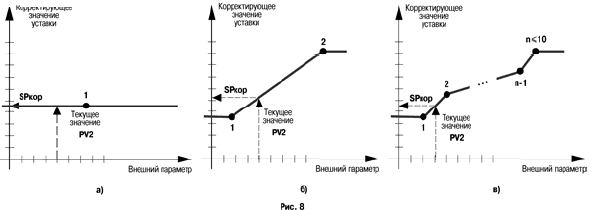
В ряде случаев требуется, чтобы уставка не являлась константой, а изменялась в зависимости от какогото внешнего параметра. Например, в системах отопления температура теплоносителя должна меняться в зависимости от температуры наружного воздуха. Для решения этой задачи в ТРМ212 введен График коррекции уставки, который представляет собой зависимость корректирующего значения уставки от внешнего параметра.
Для Графика можно задать до 10 узловых точек, которые автоматически соединяются отрезками, образуя ломаную линию. В качестве внешнего параметра используется величина, измеренная на Входе 2. В процессе работы вычисленное по графику корректирующее значение прибавляется к уставке, и прибор будет поддерживать вместо жестко заданной уставки скорректированное по графику значение:
Уставка конечная = Заданная уставка (SP) + Корректирующее значение уставки (SРКОР) (3)
Вид и механизм работы Графика коррекции уставки для 1, 2 + n точек показаны на рис. 8,а, 8,б и 8,в, соответственно.
3.1.8. Устройства аварийной сигнализации
Порядок установки параметров устройств аварийной сигнализации описан в п. 6.2.4.
3.1.8.1. Общие сведения
Для более эффективного контроля за процессами регулирования в приборе имеется устройство диагностики обрыва контура – LВА, а также логическое устройство, работающее по принципу компаратора.
При срабатывании устройства диагностики обрыва контура процесс регулирования останавливается и засвечивается светодиод LBА. При срабатывании компаратора процесс регулирования продолжается, но светится светодиод К2 и на ВУ2 подается аварийный сигнал. К ВУ2 могут быть подключены различные сигнальные устройства: сирена, лампа, блокировочный выключатель, блок принудительного (аварийного) охлаждения или нагревания и т.п.
Внимание! Компаратор имеется только в приборах с ВУ1 аналогового типа. Свечение светодиода К2 в приборе с ВУ1, ВУ2 ключевого типа свидетельствует не о срабатывании компаратора, а о подаче на ВУ2 сигнала на закрытие задвижки.
3.1.8.2. Сигнализация об обрыве в контуре регулирования
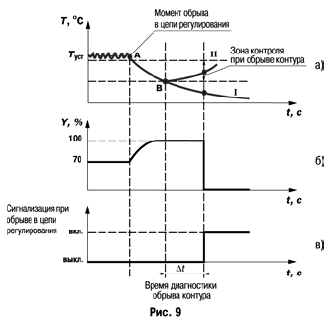
3.1.8.2.1. Устройство LBA срабатывает в том случае, когда значение регулируемого параметра не меняется в течение определенного времени при подаче максимального (минимального) управляющего воздействия. Это означает, что в контуре регулирования произошел обрыв. Работа сигнализации об обрыве контура задается двумя параметрами: «время диагностики обрыва контура» и «ширина зоны диагностики обрыва контура».
3.1.8.2.2. Устройство выдает сигнал тревоги, если по истечении времени диагностики обрыва контура измеренное значение не изменилось:
- для процесса нагрева при максимальном выходном сигнале - не увеличилось, при минимальном - не уменьшилось;
- для процесса охлаждения при максимальном выходном сигнале - не уменьшилось, при минимальном - не увеличилось.
При этом регулятор отключается.
Пример. В точке А нагреватель вышел из строя, и температура начинает уменьшаться (рис. 9,а). Регулятор увеличивает значение выходного сигнала (рис. 9,б), контролируя отклик системы. Поскольку температура продолжает уменьшаться, рассогласование растет и значение Y достигает 100 %. В момент достижения Y = 100 % (точка В) прибор начинает отсчет «времени диагностики обрыва контура»  t.
t.
Если по истечении этого времени температура продолжает уменьшаться, сигнализация срабатывает (кривая I на рис. 9,а). Если температура стала расти, но за время t изменение температуры не превысило «ширину зоны диагностики обрыва контура» (кривая II на рис. 9,а), сигнализация также срабатывает (рис. 9,в).
3.1.8.3. Компаратор
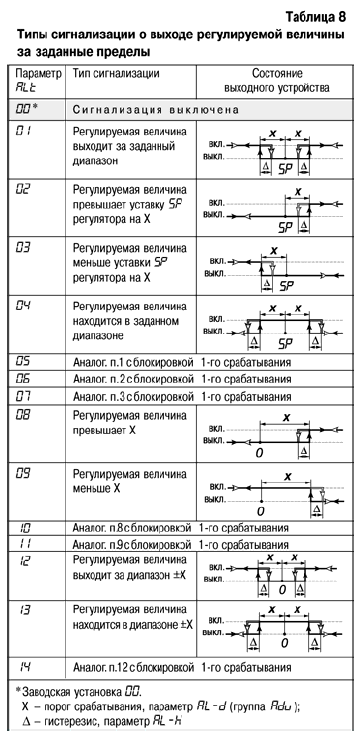
3.1.8.3.1. В зависимости от системы регулирования пользователь может задать параметры срабатывания компаратора, сигнализирующего о выходе регулируемой величины за допустимые пределы. В приборе заложено четырнадцать типов логики срабатывания компаратора (таблица 8).
Кроме того, пользователь задает порог срабатывания компаратора Х и гистерезис для устранения ненужных срабатываний из-за колебаний контролируемой величины вокруг порогового значения.
Компаратор сигнализирует об аварийной ситуации, при этом регулятор продолжает работать.
3.1.8.3.2. Функция блокировки первого срабатывания позволяет исключить включение сигнализации при включении питания.
Эта функции используется, например, при установке в системе нагревания, поскольку, как правило, значение измеряемой величины в этой системе изначально находится ниже уставки.
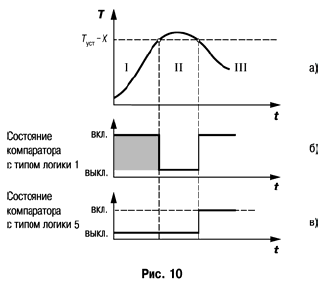
Пример. Сигнализация с типом логики 5 в системе нагревания. На рис. 10 показаны диаграммы работы компаратора без блокировки первого срабатывания (тип логики 1) (рис.10,б), и с блокировкой (тип логики 5) (рис.10,в).
При использовании типа логики 1 в момент включения прибора, когда регулируемая величина ниже порога ТУСТ - Х, происходит нежелательное срабатывание компаратора (заштрихованная площадь на рис.10,б), когда реально аварийной ситуации нет. При использовании типа логики 5 нежелательного срабатывания не происходит.
После включения прибора выход компаратора будет находиться в состоянии «выключено» до первого превышения порога ТУСТ - Х, и только когда регулируемая величина снова выйдет на порог ТУСТ - Х (этап III), выход компаратора впервые перейдет в состояние «включено» - сигнализация сработает. Далее компаратор будет работать так же, как с типом логики 1.
3.1.9. Выходные устройства прибора
ВУ предназначены для передачи управляющего сигнала на исполнительные механизмы.
3.1.9.1. Ключевое ВУ – электромагнитное реле, транзисторная оптопара, оптосимистор, выход для управления твердотельным реле – используется для управления (включения/выключения) нагрузкой либо непосредственно, либо через более мощные управляющие элементы, такие как пускатели, твердотельные реле, тиристоры или симисторы.
Прибор ТРМ212 с однотипными ВУ1 и ВУ2 ключевого типа используется только для управления трехпозиционным ИМ (задвижкой, трехходовым клапаном), который имеет электрический привод, две пары контактов для управления направлением его вращения. При подаче управляющих импульсов на первую пару контактов задвижка перемещается в одну сторону, например открывается, при подаче импульсов на вторую – закрывается.
Примечание. Трехпозиционный ИМ – далее по тексту «задвижка».
3.1.9.2. ВУ аналогового типа – это цифроаналоговый преобразователь, который формирует ток 4...20 мА или напряжение 0...10 В и используется только для управления ИМ типа «задвижка c аналоговым управлением» (электропневмопозиционеры).
3.1.9.3. Особенности подключения выходных устройств приведены в п. 5.3.2.
3.1.10. Интерфейс связи RS(485 Интерфейс связи предназначен для включения прибора в сеть, организованную по стандарту RS485. Использование прибора в сети RS485 позволяет осуществлять следующие функции:
1. Сбор данных об измеряемых величинах и протекании процессов регулирования в системе SCADA.
2. Установка параметров прибора с помощью программы «Конфигуратор ТРМ2хх».
3.1.9. Выходные устройства прибора
ВУ предназначены для передачи управляющего сигнала на исполнительные механизмы.
3.1.9.1. Ключевое ВУ - электромагнитное реле, транзисторная оптопара, оптосимистор, выход для управления твердотельным реле - используется для управления (включения/выключения) нагрузкой либо непосредственно, либо через более мощные управляющие элементы, такие как пускатели, твердотельные реле, тиристоры или симисторы.
Прибор ТРМ212 с однотипными ВУ1 и ВУ2 ключевого типа используется только для управления трехпозиционным ИМ (задвижкой, трехходовым клапаном), который имеет электрический привод, две пары контактов для управления направлением его вращения. При подаче управляющих импульсов на первую пару контактов задвижка перемещается в одну сторону, например открывается, при подаче импульсов на вторую - закрывается.
Примечание. Трехпозиционный ИМ - далее по тексту «задвижка».
3.1.9.2. ВУ аналогового типа - это цифроаналоговый преобразователь, который формирует ток 4...20 мА или напряжение 0...10 В и используется только для управления ИМ типа «задвижка c аналоговым управлением» (электропневмопозиционеры).
3.1.9.3. Особенности подключения выходных устройств приведены в п. 5.3.2.
3.1.10. Интерфейс связи RS485
Интерфейс связи предназначен для включения прибора в сеть, организованную по стандарту RS-485. Использование прибора в сети RS-485 позволяет осуществлять следующие функции:
1. Сбор данных об измеряемых величинах и протекании процессов регулирования в системе SCADA.
2. Установка параметров прибора с помощью программы «Конфигуратор ТРМ2хх».
3. Дистанционное управление процессом регулирования и автонастройки с помощью программы «Конфигуратор ТРМ2хх», работающей в среде Windows.
RS-485 является широко распространенным в промышленности стандартом интерфейса, обеспечивает создание сетей с количеством узлов (точек) до 256 и передачу данных на расстояние до 1200 м. При использовании повторителей количество подключенных узлов и расстояние передачи может быть увеличено. Для соединения приборов применяется экранированная витая пара проводов, к которым предъявляются следующие требования: сечение не менее 0,2 мм²и погонная емкость не более 60 пФ/м.
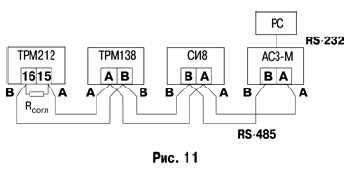
Все приборы в сети соединяются в последовательную шину (рис. 11). Для качественной работы приемопередатчиков и предотвращения влияния помех линия связи должна иметь на концах согласующий резистор сопротивлением RСОГЛ = 120 Ом, подключаемый непосредственно к клеммам прибора (см. рис. 11).
Подключение прибора к персональному компьютеру осуществляется через преобразователь интерфейсов RS-485<->RS-232 или RS-485<->USB, в качестве которого могут быть использованы преобразователи интерфейсов ОВЕН АС3, АС3-М или АС4.
Примечания.
1. Преобразователи интерфейсов ОВЕН имеют согласующий резистор внутри.
2. С описанием протокола обмена, списком параметров, программой «Конфигуратор ТРМ2хх» пользователь может ознакомиться на сайте www.owen.ru.
3. Обмен может осуществляться с одной из скоростей стандартного ряда: 2400, 4800, 9600, 14400, 19200, 28800, 36400, 57600, 115200 бит/с.
3.2. Конструкция прибора
3.2.1. Корпус
3.2.1.1. Прибор конструктивно выполнен в пластмассовом корпусе, предназначенном для щитового или настенного крепления. Эскизы корпусов с габаритными и установочными размерами приведены в Приложении А.
3.2.1.2. Для установки прибора в щит в комплекте прилагаются крепежные элементы.
3.2.1.3. На лицевой панели расположены клавиатура управления прибором, ЦИ и светодиоды, на задней – силовая и измерительная части.
3.2.1.4. Клеммник для подсоединения внешних связей (датчиков, выходных цепей и питания) у приборов щитового крепления находится на задней стенке. В при борах настенного крепления клеммник расположен под верхней крышкой. В отверстиях подвода внешних связей установлены резиновые уплотнители.
3.2.2. Индикация и управление
3.2.2.1. На рис. 12, а приведен внешний вид лицевой панели прибора ТРМ212 для корпусов настенного (Н) и щитового (Щ1) крепления, а на рис. 12,б – щитового (Щ2).
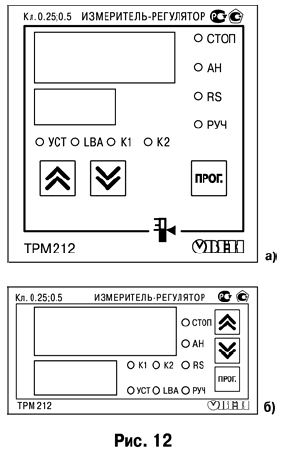
3.2.2.2. На лицевой панели расположены следующие элементы управления и индикации:
Верхний ЦИ красного цвета отображает:
• текущие значения измеряемых величин;
• сообщения об ошибках;
• название параметра в режиме ПРОГРАММИРОВАНИЕ;
• надпись MENU при просмотре МЕНЮ.
Нижний ЦИ зеленого цвета отображает:
• текущие значения измеряемых величин, уставок и выходного сигнала регулятора;
• значение параметра в режиме ПРОГРАММИРОВАНИЕ;
• название группы параметров при просмотре МЕНЮ.
Светодиоды:
К1 – светится при включенном выходном устройстве 1;
К2 – светится при включенном выходном устройстве 2;
УСТ – светится в режиме редактирования уставки;
LBA – мигает, если обнаружен обрыв в контуре регулирования;
СТОП – постоянно светится, если регулятор остановлен;
– мигает, если остановка регулятора произошла изза аварии LBA или аппаратной ошибки;
АН – постоянно светится при выполнении автонастройки;
– гаснет при удачном завершении автонастройки;
– мигает, если автонастройка закончена неудачно;
RS – засвечивается на 0,1с в момент передачи данных компьютеру;
– постоянно светится в режиме дистанционного управления регулятором;
РУЧ – светится в режиме ручного управления регулятором.
3.2.2.3. Кнопки, находящиеся на передней панели прибора, имеют следующее назначение:
 – для увеличения значения программируемого параметра;
– для увеличения значения программируемого параметра;
 – для уменьшения значения программируемого параметра;
– для уменьшения значения программируемого параметра;
 – для входа в меню программирования и для перехода к следующему параметру.
– для входа в меню программирования и для перехода к следующему параметру.
При работе с прибором ТРМ212 для входа в специальные режимы работы прибора используются комбинации кнопок:
++– для перехода к установке кодов доступа;
+– для перехода в режим ручного управления регулятором.
4. Меры безопасности
4.1. По способу защиты от поражения электрическим током прибор соответствует классу 0 по ГОСТ 12 2.007 0-75.
4.2. При эксплуатации, техническом обслуживании и поверке необходимо соблюдать требования ГОСТ 12.3.019-80, «Правил эксплуатации электроустановок потребителей» и «Правил охраны труда при эксплуатации электроустановок потребителей».
4.3. Открытые контакты клеммника прибора при эксплуатации находятся под напряжением величиной до 250 В, опасным для человеческой жизни. Любые подключения к прибору и работы по его техническому обслуживанию производить только при отключенном питании прибора и исполнительных механизмов.
4.4. Не допускается попадание влаги на контакты выходного разъема и внутренние электроэлементы прибора. Запрещается использование прибора в агрессивных средах с содержанием в атмосфере кислот, щелочей, масел и т. п.
4.5. Подключение, регулировка и техобслуживание прибора должны производиться только квалифицированными специалистами, изучившими настоящее руководство по эксплуатации.
Внимание! Соблюдение правил монтажа (п. 5) обязательно.
5. Подготовка прибора к работе
5.1. Монтаж прибора на объекте
5.1.1. Проверить состояние корпуса: корпус не должен иметь механических повреждений, лицевая панель - царапин, трещин, грязных пятен.
5.1.2. Подготовить на щите управления место для установки прибора в соответствии с Приложением А.
5.1.3. Установить прибор на щите управления, используя для его крепления монтажные элементы, входящие в комплект поставки прибора.
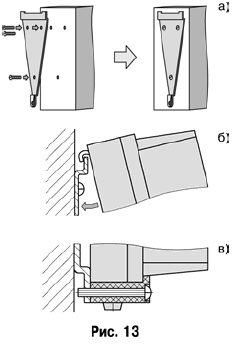
Установка приборов настенного крепления
1. Закрепить кронштейн тремя винтами М4 на поверхности, предназначенной для установки прибора (см. Приложение А и рис. 13,а).
Примечание. Винты крепления кронштейна не входят в комплект поставки.
2. Зацепить крепежный уголок на задней стенке прибора за верхнюю кромку кронштейна (рис. 13,б).
3. Прикрепить прибор к кронштейну винтом М4 35 из комплекта поставки (рис. 13,в).
Установка приборов щитового крепления
1. Вставить прибор в специально подготовленное отверстие на лицевой панели щита (см. Приложением А и рис. 14,а).
2. Вставить фиксаторы из комплекта поставки в отверстия на боковых стенках прибора (рис. 14,б).
3. С усилием завернуть винты М4 35 в отверстиях каждого фиксатора так, чтобы прибор был плотно прижат к лицевой панели щита.
5.2. Монтаж внешних связей
5.2.1. Общие указания
5.2.1.1. Подготовить кабели для соединения прибора с датчиками, исполнительными механизмами и внешними устройствами, а также с источником питания. Для обеспечения надежности электрических соединений рекомендуется использовать кабели с медными многопроволочными жилами, концы которых перед подключением следует тщательно зачистить и облудить. Зачистку жил кабеля необходимо выполнять с таким расчетом, чтобы их оголенные концы после подключения к прибору не выступали за пределы клеммника. Сечение жил кабеля не должно превышать 1 мм².
5.2.1.2. Схемы подключения датчиков и исполнительных устройств к приборам различных модификаций приведены в Приложении Б. Параметры линии соединения прибора с датчиком приведены в таблице 9.
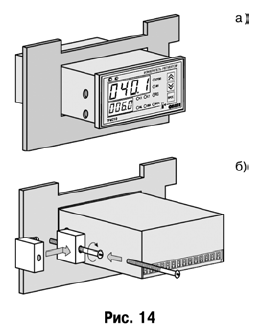
Таблица 9
|
Тип датчика или сигнала |
Длина линии, м, не более |
Сопротивление линии, Ом, не более |
Исполнение линии |
|
ТС |
100 |
15 |
Трехпроводная, провода равной длины и сечения |
|
ТП |
20 |
100 |
Термоэлектродный ка бель(компенсационный) |
|
Унифицированный сигнал постоянного тока |
100 |
100 |
Двухпроводная |
|
Унифицированный сигнал постоянного напряжения |
100 |
5 |
Двухпроводная |
5.2.2. Указания по монтажу для уменьшения электромагнитных помех
5.2.2.1. При прокладке сигнальных линий, в том числе линий «прибор – датчик», следует выделить их в самостоятельную трассу (или несколько трасс). Трассы располагают отдельно от силовых кабелей, а также от кабелей, создающих высокочастотные и импульсные помехи.
Внимание! Трассы следует планировать таким образом, чтобы длина сигнальных линий была минимальной.
5.2.2.2. Обеспечить надежное экранирование сигнальных линий. В качестве экранов могут быть использованы как специальные кабели с экранирующими оплетками, так и заземленные стальные трубы подходящего диаметра. Экраны кабелей следует подключить к заземленному контакту в щите управления.
Рабочий спай ТП должен быть электрически изолирован от внешнего оборудования!
5.2.2.3. Прибор следует устанавливать в металлическом шкафу, внутри которого не должно быть силового оборудования. Корпус шкафа должен быть заземлен.
5.2.3. Указания по монтажу для уменьшения помех, возникающих в питающей сети
5.2.3.1. Подключение прибора следует производить к сетевому фидеру 220 В 50 Гц, не связанному непосредственно с питанием мощного силового оборудования. Во внешней цепи рекомендуется установить выключатель питания, обеспечивающий отключение прибора от сети и плавкие предохранители на ток 0,5 А.
5.2.3.2. При монтаже системы, в которой работает прибор, следует учитывать правила эффективного заземления:
- все заземляющие линии прокладывать по схеме «звезда», при этом необходимо обеспечить хороший контакт с заземляемым элементом;
- заземляющие цепи должны быть выполнены как можно более толстыми проводами.
5.2.3.3. Рекомендуется устанавливать фильтры сетевых помех в линиях питания прибора.
5.2.3.4. Рекомендуется устанавливать искрогасящие фильтры в линиях коммутации силового оборудования.
5.3. Подключение прибора
5.3.1. Общие указания
5.3.1.1. Подключение прибора следует производить по схемам, приведенным в Приложении Б, соблюдая изложенную ниже последовательность действий:
1) подключить прибор к исполнительным механизмам и внешним устройствам, а также к источнику питания;
2) подключить линии связи «прибор - датчик» к первичным преобразователям;
3) подключить линии связи «прибор - датчик» к входам прибора;
4) подключить линии интерфейса RS-485.
Внимание!
1. Клеммные соединители прибора, предназначенные для подключения к сети питания и внешнего силового оборудования, рассчитаны на максимальное напряжение 250 В. Во избежание электрического пробоя или перекрытия изоляции подключение к контактам прибора источников напряжения выше указанного запрещается.
2. Для защиты входных цепей прибора от возможного пробоя зарядами статического электричества, накопленного на линиях связи «прибор - датчик», перед подключением к клеммнику прибора их жилы следует на 1...2 с соединить с винтом заземления щита.
Примечание. Подключение линий интерфейса RS-485 необходимо производить только тогда, когда планируется конфигурирование и управление прибором с ПК или регистрация данных на ПК.
5.3.2. Подключение внешних устройств управления
Цепи выходных устройств, как ключевых, так и аналоговых, имеют гальваническую изоляцию от схемы прибора. Исключение составляет выход «Т» для управления внешним твердотельным реле. В этом случае гальваническую изоляцию обеспечивает само твердотельное реле.
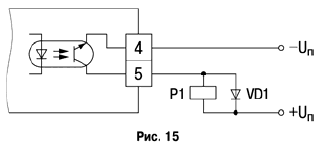
5.3.2.1. Подключение нагрузки к ВУ типа «транзисторная оптопара» («K»)
Транзисторная оптопара применяется, как правило, для управления низковольтным электромагнитным или твердотельным реле (до 50 В постоянного тока). На рис. 15 приведена схема подключения для ВУ1. Во избежание выхода из строя транзистора из-за большого тока самоиндукции, параллельно обмотке реле Р1 необходимо устанавливать диод VDl, рассчитанный на ток 1 А и напряжением 100 В.
5.3.2.2. Подключение нагрузки к ВУ типа «симисторная оптопара» («С»)
Оптосимистор включается в цепь управления мощного симистора через ограничивающий резистор R1 (для ВУ 1 см. рис. 16). Сопротивление резистора зависит от величины тока управления симистора, R1=30/I ОТКР.
Оптосимистор может также управлять парой встречно_параллельно включенных тиристоров VS1 и VS2 (для ВУ1 см. рис. 17). Для предотвращения пробоя тиристоров из-за высоковольтных скачков напряжения в сети к их выводам рекомендуется подключать фильтрующую RC-цепочку (R2C1).
5.3.2.3. Подключение нагрузки к ВУ типа «ЦАП 4...20 мА» («И»)
Для работы ЦАП 4...20 мА используется внешний источник питания постоянного тока (для ВУ1 см. рис. 18), номинальное значение напряжения которого UП рассчитывается следующим образом:
UП.MIN < UП < UП.MAX
UП.MIN = 10 В + 0.02 А х RН
UП.MAX = UП.MIN + 2,5 В,
где UП - номинальное напряжение источника питания, В;
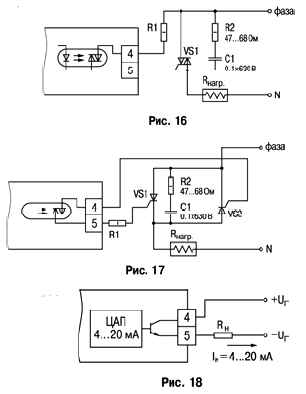
UП.MIN – минимально допустимое напряжение источника питания, В;
UП.MAX – максимально допустимое напряжение источника питания, В;
RH– сопротивление нагрузки ЦАП, Ом.
Примечание. Питание внешнего источника и прибора рекомендуется осуществлять от одной сети.
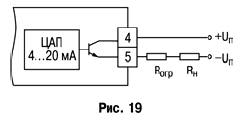
Если по какойлибо причине напряжение источника питания ЦАП, находящегося в распоряжении пользователя, превышает расчетное значение Uп.max, то последовательно с нагрузкой необходимо включить ограничительный резистор (см. рис. 19), сопротивление которого RОГР рассчитывается по формулам:
где RОГР – номинальное значение ограничительного резистора, кОм;
RОГР.MIN – минимально допустимое значение ограничительного резистора, кОм;
RОГР.MAX – максимально допустимое значение ограничительного резистора, кОм;
IЦАП.MAX – максимальный выходной ток ЦАП, мА.
Внимание! Напряжение источника питания ЦАП не должно превышать 36 В.
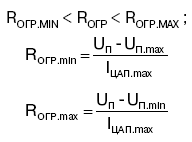
5.3.2.4. Подключение нагрузки к ВУ типа «ЦАП 0...10 В» («У»)
Для работы ЦАП 0...10 В используется внешний источник питания постоянного тока (для ВУ1 см. рис. 20). Номинальное значение напряжения которого UП находится в диапазоне 15...32 В.
Примечание. Питание внешнего источника и прибора рекомендуется осуществлять от одной сети.
Сопротивление нагрузки, RН подключаемой к ЦАП, должно быть не менее 2 кОм.
Внимание! Напряжение источника питания ЦАП не должно превышать 36 В.
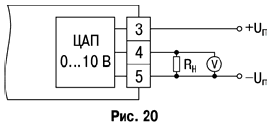
5.3.2.5. Подключение к ВУ для управления твердотельным реле («Т»)
Выход «Т» имеет два состояния с низким и высоким уровнем напряжения. В приборе используются выходы, выполненные на основе транзисторного ключа n-p-nтипа (для ВУ1 см. рис. 21), в которых низкий логический уровень соответствует напряжению 0...1 В и высокий уровень – напряжению 4...6 В.
Данные выходы используются для подключения твердотельных реле, рассчитанных на управление постоянным напряжением 4...6 В с током управления не более 100 мА. Внутри выходного элемента устанавливается ограничительный резистор RОГР номиналом 100 Ом.
5.3.3. Подключение датчиков
5.3.3.1. Подключение термопреобразователей сопротивления
В приборах ТРМ212 используется трехпроводная схема подключения ТС. К одному из выводов ТС подсоединяются два провода, а третий подключается к другому выводу (см. рис. Б.1), Такая схема при соблюдении условий равенства сопротивлений всех трех проводов позволяет скомпенсировать их влияние на результаты измерения температуры.
ТС могут подключаться к прибору и по двухпроводной схеме, но при этом отсутствует компенсация сопротивления соединительных проводов и поэтому может наблюдаться некоторая зависимость показаний прибора от колебаний температуры проводов. При использовании двухпроводной схемы необходимо при подготовке прибора к работе выполнить действия, указанные в Приложении В.
5.3.3.2. Подключение термопар
Подключение ТП к прибору должно производиться с помощью специальных компенсационных (термоэлектродных) проводов, изготовленных из тех же самых материалов, что и ТП. Допускается также использовать провода из металлов с термоэлектрическими характеристиками, которые в диапазоне температур 0...100 °С аналогичны характеристикам материалов электродов ТП. При соединении компенсационных проводов с ТП и прибором необходимо соблюдать полярность (см. рис. Б.1). При нарушении указанных условий могут возникать значительные погрешности при измерении.
Примечание. В приборе предусмотрена схема автоматической компенсации температуры свободных концов ТП «холодного спая». Датчик температуры «холодного спая» установлен рядом с присоединительным клеммником.
Внимание! Запрещается использовать ТП с неизолированным рабочим спаем.
5.3.3.3. Подключение датчиков, имеющих унифицирован(ный выходной сигнал тока или напряжения
5.3.3.3.1. Многие первичные преобразователи физических величин (тензодатчики, ТП, датчики влажности и т.п.) оснащены нормирующими преобразователями этих величин в унифицированные сигналы постоянного тока 0...5 мА, 0...20 мА, 4...20 мА.
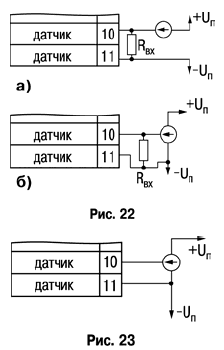
При подключении этих датчиков к TPM2l2 необходимо использовать внешний нагрузочный резистор, через который будет протекать ток нормирующего преобразователя, на котором прибор и будет измерять падение напряжения. Резистор должен быть прецизионным (типа С2-29В, С5-25 и т.п., мощностью не менее 0,25 Вт, сопротивлением 100 Ом ± 0,1 %) и высокостабильным во времени и по температуре (ТКС не хуже 25х10-6 1/°С). Для питания нормирующих преобразователей необходим дополнительный источник постоянного напряжения.
На рис. 22,а приведена двухпроводная схема подключения для датчиков с унифицированным выходным сигналом тока 4...20 мА, а на рис. 22, б - трехпроводная схема подключения для датчиков с сигналом тока
0+5 (20) мА. Значение напряжения Uп указывается в технических характеристиках нормирующего преобразователя и, как правило, лежит в диапазоне 18...36 В.
5.3.3.3.2. Подключение датчиков с унифицированным сигналом постоянного напряжения 0...1 В и минус 50...+50 мВ следует производить в соответствии со схемой на рис. Б.1.
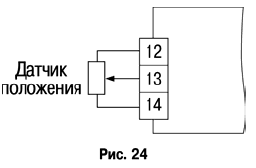
Примечание. ТРМ212 может использоваться также как вольтметр (0...1 В) или милливольтметр (- 50...+50 мВ), рис. 23.
5.3.3.4. Подключение датчиков положения
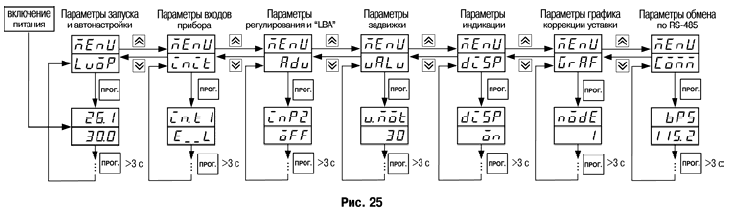
5.3.3.4.1. Датчики положения предназначены для определения текущего положения (степени открытия или закрытия) запорно_регулирующих клапанов, задвижек, шаберов и т.п. при регулировании технологических параметров.
5.3.3.4.2. В промышленности чаще всего применяются датчики положения резистивного типа. В датчиках этого типа в качестве чувствительного элемента используется резистор переменного сопротивления, ползунок которого механически связан с регулирующей частью исполнительного механизма.
ТРМ212 способен обрабатывать сигналы датчиков положения резистивного типа с сопротивлением до 2 кОм.
Схема подключения резистивного датчика положения к Входу 2 прибора представлена на рис. 24.
5.3.3.4.3. Находят применение и датчики, формирующие выходной сигнал в виде линейно_изменяющегося тока, сила которого зависит от положения ИМ в данный момент. Прибор способен обрабатывать сигналы датчиков с токовым выходом 0...5 мА, 0...20 мА и 4...20 мА.
Подключение датчиков этого типа к ТРМ212 аналогично подключению датчиков с унифицированным выходным сигналом тока (см. п. 5.3.3.3.1).
Внимание! При использовании датчиков положения любого типа должна быть проведена совместная юстировка системы «датчик-прибор» (см. Приложение Е, п. Е.8).
5.4. Включение и опробование прибора
5.4.1. После подключения необходимых связей включить питание прибора.
5.4.2. Прибор запускает инициализацию, при этом все ЦИ и светодиоды не светятся, выходные устройства находятся в состоянии «Выключено», и через две секунды прибор перейдет в режим РАБОТА. В режиме РАБОТА производится измерение входных величин (при не обходимости с последующим вычислением из них суммы, разности и пр.), вывод их на ЦИ и формирование управляющих выходных сигналов.
5.4.3. При наличии некоторых неисправностей прибор выводит на ЦИ следующие сообщения:
• Err.S – ошибка на входе;
• Err.P – ошибка датчика положения;
• Err.C – ошибка вычисления.
Более подробное описание и способы устранения неисправностей приведены в Прил. Д.
5.4.4. Перед началом эксплуатации необходимо:
• запрограммировать прибор (раздел 6);
• провести юстировку датчика положения, если предполагается его использовать (см. п. Е.8);
• провести настройку ПИДрегулятора (раздел 7).
6. Программирование прибора
6.1. Общие сведения
6.1.1. Программируемые параметры задаются пользователем в режиме ПРОГРАММИРОВАНИЕ и сохраняются при отключении питания в энергонезависимой памяти.
6.1.2. Основные параметры прибора ТРМ212 объединены в семь групп: LVOP, init, AdV,VaLV, DISP, GrAF и COMM, составляющих меню прибора (рис. 25). Полный список программируемых параметров приведен в Приложении Г.
В группы параметров включены:
• LVOP – параметры оперативного пользования на верхнем уровне: запуск регулирования и автонастройки, уставка.
• init – параметры настройки входов прибора; устанавливаются, как правило, один раз при монтаже системы.
• AdV – параметры дополнительных настроек; многие из них не являются обязательными, но могут расширить возможности прибора и улучшить качество регулирования.
• VaLV – параметры задвижки.
• DISP – параметры управления индикацией.
• GrAF – параметры для задания графика коррекции уставки.
• COMM – параметры настройки интерфейса RS485.
Примечание. Существуют группы служебных параметров, вход в которые осуществляется через коды доступа.
6.1.3. Для перехода в режим ПРОГРАММИРОВАНИЯ из режима РАБОТА следует нажать и удерживать не менее 3 с кнопку . После чего на верхнем ЦИ появляется надпись MENU, на нижнем – название группы LVOP.
. После чего на верхнем ЦИ появляется надпись MENU, на нижнем – название группы LVOP.
Переход между заголовками групп меню осуществляется кнопками  (к следующему) и
(к следующему) и  (к предыдущему). Переход к первому параметру каждой группы осуществляется кратким нажатием кнопки, а возврат в заголовок группы (из любого параметра группы) – дли тельным (более 3 с) нажатием кнопки.
(к предыдущему). Переход к первому параметру каждой группы осуществляется кратким нажатием кнопки, а возврат в заголовок группы (из любого параметра группы) – дли тельным (более 3 с) нажатием кнопки.
6.1.4. Для перехода в специальные режимы работы прибора используются комбинации кнопок:
++– для перехода к установке кодов доступа, при этом на ЦИ высвечивается сообщение PASS=0. Установка кода осуществляется кнопками и;
+ – переход в режим ручного управления регулятором.
6.2. Порядок программирования
После первого включения и опробования прибора необходимо отключить питание ИМ, после чего задать нужные значения программируемых параметров.
Первое программирование прибора следует осуществлять строго в приведенной ниже последовательности.
6.2.1. Установка параметров входов
Порядок программирования входов прибора:
• задать функцию на Входе 2 (п. 6.2.1.1);
• провести программирование основного измерительного Входа 1 (п.п.6.2.1.2 –6.2.1.6, 6.2.2);
• если второй вход используется как измерительный (inP2 = in.t2), провести программирование параметров для Входа 2, п.п.6.2.1.2 – 6.2.1.6, 6.2.2.
6.2.1.1. Распределение функций на Входе 2
Прибор ТРМ212 – прибор для управления задвижкой, который в зависимости от назначения функции на Входе 2 программно конфигурируется на выполнение одной из задач:
• одноканальный регулятор для управления задвижкой без дополнительных функций (в параметре inP2 установлено значение oFF ) – заводская установка;
• регулятор соотношения, разности, расхода для задвижки (в параметре inP2 установлено значение in.t2 );
• одноканальный регулятор для управления задвижкой с функцией коррекции уставки по-заданному пользователем графику (в параметре inP2 установлено значение in.t2 );
• одноканальный регулятор для управления задвижкой с дополнительным входом для дистанционного запуска и остановки регулирования (в параметре inP2 установлено значение EVNt);
• одноканальный регулятор для управления задвижкой с датчиком положения (в параметре inP2 установлен тип датчика положения – резистивный V.PTR или токовый V.CS).
Примечания.
1. Использование датчиков положения возможно только для приборов с ключевыми ВУ.
2. Для датчика положения задается только его тип (токовый или резистивный), а выходной сигнал, например 4..20 мА или 0+5 мА; 0+100 Ом или 0+1 кОм – автоматически нормируется прибором при юстировке (п. E.8).
Для задания функции Входа 2 перейти к параметру inP2. Для этого в режиме РАБОТА, нажать и удерживать кнопку , (переход в меню LVOP), нажать два раза кнопку до появления на нижнем ЦИ меню ADV, затем нажать. Кнопками,выбрать значение параметра, требуемое при данном назначении прибора и нажать.
Внимание! Изменение функции на Входе 2 возможно только при остановленном регулировании (r.S = StOP).
6.2.1.2. Установка типа датчика
Для установки параметров входов перейти в меню init. Для этого в режиме РАБОТА нажать и удерживать кнопку(переход в меню LVOP), нажать кнопку, затем.
Задать значение параметра in.t1 (2 ) в соответствии с типом используемого датчика.
Внимание! Здесь и далее: новое значение параметра записывается в память; прибор начинает работать с новым значением только после кратковременного нажатия кнопки– при переходе к следующему параметру.
Значения параметра, соответствующие типам ТС, начинаются с латинской строчной буквы r (resistor – сопротивление), после которой следует значение W100. Для датчиков с R0 = 100 Ом в значении параметра после буквы r стоит точка, перед наименованием градуировки – тире (например, значение параметра r.385 соответствует датчику TCП(Pt100) c W100 = 1.3850, значение параметра r.21 –датчику ТСП гр. 21).
Значения параметра, соответствующие типам ТП, начинаются с прописной латинской буквы Е (ЭДС), после которой следует обозначение НСХ ТП. Например, Е-А2 соответствует ТП ТВР(А2).
Значения параметра, соответствующие типам датчиков, с выходным сигналом постоянного тока и напряжения начинаются с букв i (ток) и U (напряжение), соответственно, после которых указаны границы диапазона выходного сигнала. Например, i0-5 соответствует датчику с выходным сигналом постоянного тока 0...5 мА.
Примечание. Если Вход 2 используется как измерительный (inP2 = in.t2), типы датчиков в параметрах in.t1 и in.t2 должны быть установлены так, чтобы прибор измерял одинаковые физические величины по обоим входам, например, ко Входу 1 подключена ТП, а ко Входу 2 – ТС.
6.2.1.3. Установка точности вывода температуры (для датчиков ТС и ТП)
При использовании датчиков термосопротивления или ТП можно установить желаемую точность отображения температуры на ЦИ, задав параметры dPt1, dPt2.
При работе с температурами выше 1000 °С необходимо устанавливать значение параметров, равное 0. При работе с температурами ниже 1000 °С рекомендуется устанавливать значение параметров, равное 1.
Примечание. При использовании датчиков с унифицированным сигналом эти параметры для программирования недоступны.
6.2.1.4. Установка диапазона измерения (для датчиков с унифицированным сигналом)
При использовании датчиков с унифицированным выходным сигналом тока или напряжения необходимо провести настройку диапазона измерения, задав значения параметров:
• dP1 (dP2) (положение десятичной точки);
• in.L1 (in.L2) (нижняя граница диапазона измерения Входа 1 (Входа 2));
• in.H 1 (in.H2) (верхняя граница диапазона измерения Входа 1 (Входа 2)).
Примечание. При использовании ТС и ТП эти параметры на ЦИ не высвечиваются.
Параметр «нижняя граница диапазона измерения» определяет, какое значение измеряемой величины будет выводиться на ЦИ при минимальном уровне сигнала с датчика (на пример, 4 мА для датчика с выходным сигналом тока 4...20 мА).
Параметр «верхняя граница диапазона измерения» определяет, какое значение измеряемой величины будет выводиться на ЦИ при максимальном уровне сигнала с датчика (например, 20 мА для датчика с выходным сигналом тока 4...20 мА или 1 В для датчика с выходным сигналом напряжения 0...1 В).
Параметр «положение десятичной точки» определяет количество знаков после запятой, которое будет выводиться на ЦИ.
Для получения более высокой разрешающей способности следует устанавливать большее значение dP. Например, для использования датчика давления с диапазоном 0...15 атмосфер и выходным сигналом тока 0...20 мА наилучшие результаты могут быть получены следующими значениями параметров: in.L= 0.00 и in.H = 15.00 при dP = 2.
Внимание!
1. Значение параметра dP влияет на отображение измеренной величины и параметров, значения которых задаются в единицах измеряемой величины (см. таблицу Г).
2. Для датчиков ТС и ТП параметр dP по умолчанию равен 1 и не изменяется.
3. За каждым типом датчика в памяти прибора сохраняется определенное значение параметра dP. Поэтому, например, при замене датчика (изменении параметра «тип датчика») с унифицированным сигналом с установленным значением dP = 0 на датчик ТС (у которого по умолчанию dP = 1), значение dP автоматически изменится. При этом изменятся значения уставки и других параметров, зависящих от dP, т.е. в нашем примере: при dP = 0 уставка была равна, например, 1000, при dP =1 она станет 100.0.
6.2.1.5. Установка функции вычисления квадратного корня на входе (для датчиков с унифицированным сигналом)
При работе с датчиками, унифицированный выходной сигнал которых пропорционален квадрату измеряемой величины, можно использовать функцию вычисления квадратного корня для каждого из входов прибора отдельно.
Значение, которое подается на ЦИ и выдается в сеть RS485 в качестве измеренного на входе (PV), вычисляется по формуле:

Где: IХ – значение сигнала с датчика в относительных единицах диапазона 0+1.000;
ПН – заданное пользователем нижнее значение границы диапазона измерения;
ПВ– заданное пользователем верхнее значение границы диапазона измерения.
Для активизации вычисления квадратного корня – задать ON в параметрах SQr1 (2).
Внимание! Данная функция и Вычислитель (см. п.п.3.1.6, 6.2.3.1) независимы друг от друга. Поэтому, если, например, установлено SQr1(2) = On, Вычислитель в качестве PV1(2) будет использовать значение, вычисленное по формуле (4).
6.2.1.6. Установка параметров коррекции характеристики датчика
Коррекция результатов измерения, осуществляемая прибором, описана в п. 3.1.5.
Коррекция результатов измерения производится прибором после задания необходимых значений параметров SH1(2) («сдвиг измерительной характеристики датчика»), KU1(2) («на клон измерительной характеристики датчика»).
Параметр SН допускается изменять в диапазоне от минус 50,0 до +50,0°С для температурных датчиков (ТС и ТП), от минус 500 до +500 – для аналоговых.
Параметр KU допускается изменять в пределах от 0,500 до 2,000.
Примечания.
1. Необходимость осуществления коррекции измерения выявляется после проведения поверки используемых датчиков прибора.
2. При подключении ТС по двухпроводной схеме параметр SН задавать обязательно. Определение значения параметра SH производится по методике, приведенной в Приложении В.
3. При использовании датчика положения или внешнего ключа параметры коррекции характеристики для Входа 2 скрыты.
6.2.2. Установка параметров цифрового фильтра
6.2.2.1. Настройка цифрового фильтра (см. п. 3.1.4) производится путем установки двух параметров Fb1(2) («полоса цифрового фильтра») и inF1(2) («постоянная времени цифрового фильтра»).
6.2.2.2. Значение inF допускается устанавливать в диапазоне от 0 до 999 с. При inF = 0 фильтрация методом экспоненциального сглаживания отсутствует.
Значение Fb устанавливается в диапазоне от 0 до 9999 °С/с для температурных датчиков (ТС и ТП), от 0 до 9999 – для аналоговых. При Fb = 0 ограничитель единичных помех выключен.
Примечание. При использовании датчика положения или внешнего ключа параметры цифрового фильтра для Входа 2 скрыты.
6.2.3. Установка параметров процесса регулирования
Для установки параметров регулирования перейти в меню AdV, для этого нажать и удерживать кнопку, кнопкамиинайти меню AdV, затем снова нажать.
6.2.3.1. Параметры вычислителя и графика коррекции уставки
Работа Вычислителя описана в п. 3.1.6, работа графика коррекции уставки - в п. 3.1.7.6
6.2.3.1.1. Если на Вход 2 назначена функция измерительного входа (inP2 = in.t2), прибор автоматически начинает регулирование величины, вычисленной, исходя из значений, измеренных на входах прибора, по заданной формуле.
Формула Вычислителя выбирается в параметре CALC :
A.SUM - средневзвешенная сумма;
rat - отношение;
SQPV - корень из средневзвешенной суммы;
GrAF - коррекция уставки.
Весовые коэффициенты входов устанавливаются в параметрах KPV1 и KPV2 в диапазоне от минус 19,99 до 99,99.
Примечание. При inP2  in.t2 параметры для программирования недоступны.
in.t2 параметры для программирования недоступны.
Внимание!
1. Значение KPV2 не должно быть равно 0 при CALC = rat. В этом случае на ЦИ прибора будет выдаваться ошибка вычисления.
2. При работе с Вычислителем при различных значениях dPt1 и dPt2 (dP1 и dP2) значение с Вычислителя отображается на ЦИ с точностью, определенной в параметре dPt1(dP1).
6.2.3.1.2. Если в качестве формулы Вычислителя выбрана коррекция уставки (CALC =GrAF ), то уставка регулятора будет меняться в соответствии с заданным графиком.
Для задания параметров графика коррекции уставки перейти в меню GrAF для этого нажать и удерживать кнопку, кнопкамии найти меню GrAF, затем снова нажать.
Количество узловых точек задается в параметре nOdE в диапазоне от 1 до 10.
Координаты узловых точек задаются в параметрах X i и Y i, где i – номер точки.
В параметре X задается значение внешнего параметра в диапазоне от минус 1999 до 3000. В параметре Y задается корректирующее значение уставки в диапазоне от минус 1999 до 3000.
Примечания.
1. Для удаления точек в уже заданном Графике необходимо уменьшить значение параметра nOdE. При этом удалятся координаты точек с большими номерами.
Удалить точку в середине графика можно двумя способами:
Способ 1: изменить значение параметра nOdE и заново задать координаты точек, располагающихся после удаленной.
Способ 2: не изменяя значения параметра nOdE, присвоить удаляемой точке координаты любой соседней точки.
2. Для добавления одной или нескольких точек необходимо увеличить значение параметра nOdE. После этого в группе GrAF появятся параметры X и Y для добавляемых точек. Задать координаты добавляемых точек в параметрах X и Y. При этом порядок задания точек не имеет значения, поскольку в процессе работы прибор произведет автоматическую сортировку, и точки расположатся на Графике в соответствии с их координатами.
3. Если у двух и более последовательно расположенных точек заданы одинаковые значения параметра X, то при значении внешнего параметра, равном X, корректирующее значение будет равно значению Y точки с меньшим номером в этой группе точек.
6.2.3.2. Параметры уставки
Диапазон уставки задается с помощью параметров SLL («нижняя граница диапазона задания уставки») и SLH («верхняя граница диапазона задания уставки»).
Параметры SL.L, SL.H могут принимать значения:
• – 1999+3000 при dP = 0;
• – 19.99+300.00 при dP = 2;
• – 199.9+3000.0 при dP = 1;
• – 1.999+30.000 при dP = 3.
6.2.3.3. Параметры ПИД-регулятора Работа ПИД-регулятора описана в п. 3.1.7
6.2.3.3.1. Установка способа регулирования
Для конкретной системы регулирования нужно выбрать способ управления (см. п. 3.1.7.2), задав соответствующее значение параметра OrEU:
• Or.r – обратное управление, применяется для систем нагревания;
• Or.d – прямое управление, применяется для систем охлаждения.
6.2.3.3.2. Установка начального значения регулируемой величины
Начальное значение регулируемой величины или значение регулируемой величины при нулевой мощности – значение, которое будет поддерживаться при полностью закрытой задвижке (см. п. 7.1). Оно задается в параметре PV0 в соответствующих единицах измерения в диапазоне от минус 100 до 2000. Заводская установка – 20, что соответствует комнатной температуре и подходит для большинства объектов регулирования.
Этот параметр характеризует объект, и от корректности установленного значения зависит точность определения коэффициентов ПИД-регулятора в процессе АВТОНАСТРОЙКИ (см.п. 7.1).
6.2.3.3.3. Установка режима быстрого выхода на уставку
Данный режим обеспечивает достижение заданной температуры с максимальной скоростью и минимальным перерегулированием.
Включение режима осуществляется заданием в параметре raMР значения On.
Рекомендуемое значение параметра raMР для конкретной системы определяется прибором в процессе АВТОНАСТРОЙКИ (см. п. 7.1).
6.2.3.3.4. Основные параметры ПИД-регулятора
Коэффициенты ПИД-регулятора (параметры P, i, d) подробно описаны в разделе 7. Их значения могут быть установлены вручную по усмотрению пользователя (см. п. 7.2) либо определены прибором в процессе АВТОНАСТРОЙКИ (см. п. 7.1).
6.2.3.3.5. Дополнительные настройки ПИД-регулятора
6.2.3.3.5.1. Зона нечувствительности (см. п. 3.1.7.3) задается в параметре db. Значение параметра dB устанавливается в диапазоне от 0,0 до 20.0 °С для температурных датчиков (ТС и ТП), от 0 до 200 – для аналоговых в единицах измерения входной величины.
6.2.3.3.5.2. Если необходимо, установить в параметре VSP скорость изменения уставки (см. п. 3.1.7.4).
6.2.3.3.5.3. Ограничения выходного сигнала (см. п. 3.1.7.5) осуществляются с помощью параметров OL.L, OL.H.
Ограничение минимального значения выходного сигнала OL.L устанавливается в процентах и может принимать значения от 0 до OL.H. Если рассчитанное значение выходного сигнала меньше установленного в параметре OL.L, то на выход регулятора будет выдан сигнал OL.L.
Ограничение максимального значения выходного сигнала OL.H устанавливается в процен тах и может принимать значения от OL.L до 100. Если рассчитанное значение выходного сигнала больше установленного в параметре OL.H, на выход регулятора будет выдан сигнал OL.H.
Примечания.
1. В приборе с ВУ ключевого типа параметры OL.L и OL.H можно устанавливать только при работе с датчиком положения (inP2 = V.PRT или V.CS). В этом случае они определяют минимальную и максимальную степень открытия задвижки соответственно.
При возникновении ошибки датчика положения (Err.P) ограничители не работают.
2. Ограничения действуют в режимах автоматического и дистанционного управления регулятором (см. п. 8.2), а также в состояниях «ошибка» и «остановка регулирования» (см. п. 6.2.3.3.6).
6.2.3.3.6. Установка выхода регулятора в состояниях «ошибка» и «остановка регулирования»
6.2.3.3.6.1. Настройка состояния «остановка регулирования».
При остановленном регулировании(r.S = StoP) ВУ ключевого типа переводятся в состояние, определенное в параметре MVSt:
CLOS – задвижка закрыта;
OPEN – задвижка открыта;
HOLD – задвижка остается в прежнем положении.
Для прибора с ВУ аналогового типа настройка состояния «остановка регулирования» отличается тем, что существует возможность самостоятельно устанавливать произвольную мощность на выходе. При остановленном регулировании ВУ переводятся в состояние, определенное в параметре MdSt: O – прибор выдает выходной сигнал, равный последнему, определенному до остановки регулирования, значению выходного сигнала; MVSt – прибор выдает выходной сигнал, равный значению, установленному в параметре MVSt.
6.2.3.3.6.2. Настройка состояния «ошибка»
При обнаружении ошибки (см. Прил. Д) или при срабатывании устройства «LBA»:
– прибор с ВУ аналогового типа прекращает регулирование, выдает и удерживает выходной сигнал, равный значению, определенному параметром MVER;
– прибор с ВУ ключевого типа прекращает регулирование и выдает сигнал, требуемый для перевода задвижки в состояние, определенное параметром MVER, после чего размыкает оба ВУ и ждет дальнейших действий оператора. Сигнал тревоги выключается установкой в параметре r.S значения StOP. Возобновление работы регулятора – установкой в параметре r.S значения rUn.
6.2.4. Настройка компаратора и устройства «LBA»
Работа компаратора и устройства «LBA» описана в п.3.1.8.
6.2.4.1. Настройка устройства «LBA»
6.2.4.1.2. Время диагностики обрыва контура (параметр LBA) измеряется в секундах и может быть вычислено по следующей методике вычисления времени диагностики обрываконтура:
а) установить выходной сигнал на максимальный уровень;
б) измерить время, за которое измеряемая величина изменится на ширину зоны диагностики обрыва контура (по умолчанию ширина этой зоны равна 10);
в) увеличить измеренное время вдвое и принять его за время диагностики обрыва контура.
При значении LBA, равном нулю, сигнализация об обрыве контура отключается, параметр LBAb недоступен.
6.2.4.1.2. Ширина зоны диагностики обрыва контура задается в параметре LBAb в единицах измерения входной величины в диапазоне от 0,0 до 999,9 для температурных датчиков (ТСП, ТСМ и ТП) и от 0 до 9999 – для аналоговых.
Примечание. Параметры «LBA» можно устанавливать только для приборов с ВУ аналогового типа и приборов с ВУ ключевого типа с датчиком положения (inP2 = V.PRT или V.CS).
6.2.4.2. Настройка компаратора
6.2.4.2.1. При настройке компаратора следует выбрать один из четырнадцати типов логики срабатывания (см. п. 3.1.8.3.1) и установить требуемое значение параметра ALt (см. табл. Г.1).
6.2.4.2.2. После выбора логики срабатывания необходимо настроить порог срабатывания и гистерезис компаратора – параметры AL.d и AL.H, соответственно.
Примечание. При включенном графике коррекции уставки (CALC = GrAF) порог срабатывания и гистерезисотсчитываются от скорректированного значения уставки (см. формулу (3)).
При установке в параметре ALt значения 0 компаратор будет выключен. Параметры AL.d, AL.H – недоступны. Параметр AL.H может принимать значения в диапазоне от 0 до 3000. Параметр AL.d может принимать значения от минус 1999 до 3000.
6.2.5. Установка параметров задвижки
6.2.5.1. Для описания задвижки существуют параметры:
• V.Mot («полное время хода задвижки»), устанавливается в диапазоне от 5 до 999 с и определяет время перемещения задвижки из полностью открытой в полностью за крытую и наоборот (указывается в характеристиках самого ИМ);
• V.GAP («время выборки люфта»), устанавливается в диапазоне от 0 до 10,0 с;
• V.dB («зона нечувствительности задвижки»):
-для прибора с ВУ ключевого типа устанавливается в диапазоне от 0 до 9999 мс и определяет минимальную длительность включения ИМ;
-для прибора с ВУ аналогового типа устанавливается в диапазоне от 0 до 100 % и определяет минимальную степень открытия задвижки.
Иными словами, прибор будет выдавать выходной сигнал на ИМ, только когда рассчитанная им длительность импульса включения (мощность) больше или равна V.dB.
Параметр используется для защиты ИМ от частых включений;
• V.rEV («время реверса») или минимальное время простоя при смене направления движения – интервал между выключением и включением на обратное направление, устанавливается в диапазоне от 0 до 10,0 с.
• V.tOF («пауза между импульсами доводки») устанавливается в диапазоне от 0 до 9 с и определяет частоту подачи импульса доводки длительностью 1 с в крайних положе ниях при работе без датчика положения. Используется для устранения влияния ошибки позиционирования задвижки, возникающей, например, изза неточнозаданных параметров задвижки или изза возможного различия реального времени хода в прямом и обратном направлениях. При значении OFF импульсы доводки не подаются.
Примечание. Для прибора с ВУ аналогового типа параметры V.GAP, V.rEV и V.tOF недоступны.
6.2.5.2. Параметр V.Mot является обязательным для программирования. Прибор не сможет управлять задвижкой, если установлено некорректное значение этого параметра.
Параметры V.GAP, V.dB, V.rEV желательно устанавливать, если имеются точные или приблизительные данные об их значениях, это повысит качество регулирования и продлит срок службы ИМ.
Одновременное использование параметров V.GAP и V.tOF нецелесообразно, поскольку при включенном доводчике люфт автоматически компенсируется.
Примечание. Неточное задание параметров при управлении реальной задвижкой может привести к накоплению рассогласования. В результате этого в крайних положениях может быть подан сигнал на открытие или на закрытие, когда реальная задвижка уже полностью открыта или закрыта. Это может повлечь за собой поломку оборудования, поэтому рекомендуется использование задвижек с применением концевых выключателей.
6.2.6. Настройка индикации
6.2.6.1. По умолчанию в режиме РАБОТА на верхний ЦИ выводится измеренная на Входе 1 величина, на нижний ЦИ – значение уставки. Пользователь может назначить дополнитель ные величины, выводимые на ЦИ. В приборе существует пять режимов индикации, в каждом из которых на ЦИ выводятся значения различных величин (см. таблицу 10).
Таблица 10. Значения величин, выводимых на ЦИ в различных режимах индикации
|
Режим индикации |
1 |
2 |
3 |
4 |
5 |
|
|
|
|
|
(только для прибора с ВУ аналогового типа) |
|
|
Верхний ЦИ |
Величина, измеренная на Входе 1 |
Значение на выхо- де Вычислителя |
Величина, измеренная на Входе 1 |
Значение на выходе Вычислителя |
|
|
Нижний ЦИ |
Значение Уставки |
Величина, изме- ренная на Входе 2 |
Значение Уставки |
Выходная мощность ПИД-регулятора |
|
Каждый из пяти режимов может отдельно включаться или выключаться в группе diSP, в параметрах diS1 – diS5 соответственно. При значении On режим индикации добавляется в режим РАБОТА, при значении OFF индикация параметров этого режима выключается.
Если включено два или более режимов, переключение между ними в режиме РАБОТА осуществляется коротким нажатием кнопки.
Примечания.
1. Для индикации значения с датчика положения задвижки используйте режим индикации 2.
2. Не рекомендуется включать более двух режимов индикации, поскольку в приборе не предусмотрена индикация обозначения выводимых параметров. Определить значения каких параметров в данный момент отображены на ЦИ возможно только косвенно: в режимах индикации 1 и 3 светится светодиод УСТ, индицирующий режим РЕДАКТИРОВАНИЯ УСТАВКИ (см. п. 8.2.1.2).
3. Параметры DIS2DiS5 скрыты, если использование режима индикации невозможно. Например, diS3 скрыт, когда ко Входу 2 ничего не подключено, подключен датчик положения или ключ. Когда параметр DIS скрыт, режим индикации, который он задает автоматически выключается в режиме РАБОТА.
6.2.6.2. Прибор может автоматически переходить из режима ПРОГРАММИРОВАНИЕ в режим РАБОТА (к индикации измеряемых величин) по истечении времени, установленного в параметре rEt (группа diSP). При установке в параметре rEt значения OFF возврат к индикации измеряемых величин производится через меню прибора.
6.2.7. Настройка обмена данными через интерфейс RS 485
Настройка обмена данными осуществляется параметрами группы CoMM:
• bPS («скорость обмена в сети»), допустимые значения, 2400, 4800, 9600, 14400,19200, 28800, 38400, 57600, 115200 бит/с;
• A.LEn («длина сетевого адреса»), допустимые значения 8 или 11 бит;
• Addr («базовый адрес прибора») диапазон значений:
0...255 при A.LEn = 8
0...2046 при A.LEn = 11;
• rSdL («задержка при ответе по RS485»), диапазон значений 1...45 мc.
Прибор ТРМ212 имеет также следующие фиксированные параметры обмена, не отображаемые на ЦИ: количество стопбит – «1» (Sbit); длина слова данных – «8 бит» (LEn); контроль четности – «нет» (PrtY).
Внимание!
1. «Базовый адрес» следующего прибора в сети задается как <«Базовый адрес» ТРМ212 + 2>.
2. Новые значения параметров обмена вступают в силу только после перезапуска прибора (после выключения и последующего включения питания) или перезапуска по RS485.
6.2.8. Защита от несанкционированного доступа
Для защиты от нежелательных изменений программируемых параметров существуют параметры секретности OaPt, WtPt и EdPt, осуществляющих по схеме "ИЛИ" защиту программируемых параметров.
Доступ к этим параметрам осуществляется через код доступа PASS = 100 (набрать код доступа п. 6.1.4 и нажать).
6.2.8.1. Защита параметров от просмотра
Пользователь может запретить просмотр параметров с лицевой панели, в этом случае параметры не будут отображаться на ЦИ. Запрет просмотра определенных программируемых параметров или их групп устанавливается заданием соответствующего значения параметра OAPt, см. Приложение Г.
6.2.8.2. Защита параметров от изменения
В параметре WtPt устанавливается запрет записи значений программируемых параметров (см. Приложение Г), при этом имеется возможность просмотра ранее установленных значений.
Примечание. Независимо от значений параметров OaPt, WtPt параметры прибора могут быть изменены с помощью управляющего устройства в сети RS485 (с помощью компьютера).
6.2.8.3. Защита отдельных параметров от просмотра и изменения
Каждый конфигурационный параметр прибора ТРМ212 имеет атрибут редактирования, установка которого производится с компьютера через интерфейс RS485. Атрибут редактирования может принимать два значения: редактируемый и нередактируемый.
Параметр EdPt управляет возможностью просмотра и изменения параметров с учетом установленных пользователем атрибутов.
При установке EdPt в значении ON те параметры, у которых атрибут редактирования имеет значение «нередактируемый», становятся невидимыми. При установке в EdPt значения OFF все параметры, независимо от значения атрибута редактирования, будут видимыми.
Если в группе все параметры невидимы, то вся группа становится невидимой.
6.3. Восстановление заводских установок
В приборе имеется функция восстановления значений параметров, установленных на заводеизготовителе (см. табл. Г1, столбец 5). Для этого необходимо выключить питание прибора более, чем на 1 минуту, и далее, одновременно удерживая кнопкии , включить питание прибора. При появлении на верхнем ЦИ [– – – –] – отпустить кнопки.
7. Настройка ПИД-регулятора
7.1. Автонастройка
7.1.1. Общие сведения
Автоматическая настройка (автонастройка) предназначена для оптимальной настройки системы регулирования непосредственно на объекте.
7.1.2. Выполнение автонастройки
7.1.2.1. Для запуска автонастройки необходимо осуществить следующие действия:
1) Задать уставку регулятора SP (см. п. 8.2.1.2). Значение задаваемой уставки должно составлять 75 - 85 % максимально допустимого значения регулируемой величины для данного технологического процесса.
2) Задать параметр PV0 (см. п. 6.2.3.3.2). Значение параметра можно задать приблизительно, сохранив при этом порядок числа и вид графика на рис. 26.
3) задать в параметре r-S значение RUN;
4) запустить настройку заданием в параметре AT значения RUN , в процессе автонастройки светится светодиод АН.
7.1.2.2. Во время автонастройки прибор работает как двухпозиционный регулятор. Система осуществляет колебания, вид которых приведен на рис. 26.
7.1.2.3. В результате автонастройки прибор вычисляет оптимальные значения коэффициентов ПИД-регулятора (XP,  И и Д) для данной системы. Кроме того, при автонастройке определяется рекомендуемое значение параметра RAMP (см. п. 6.2.3.3.3). Полученные значения автоматически записываются в память прибора.
И и Д) для данной системы. Кроме того, при автонастройке определяется рекомендуемое значение параметра RAMP (см. п. 6.2.3.3.3). Полученные значения автоматически записываются в память прибора.
7.1.2.4. По окончании автонастройки светодиод АН гаснет, прибор автоматически переходит в режим РАБОТА. При сбое в процессе автонастройки ее выполнение сразу прекращается, светодиод АН мигает.
Поэтому при выполнении автонастройки особое внимание надо уделить защите прибора от различных внешних воздействий и электромагнитных помех и устранить нежелательные внешние возмущения на объекте регулирования.
Если при выполнении автонастройки произошел сбой, необходимо остановить регулятор (см. п. 8.2.1.3), выключить и снова включить питание прибора и заново запустить автонастройку.
Внимание!
1. В режиме автонастройки сохраняется возможность изменения параметров функционирования и режимов работы прибора. Но в процессе автоматической настройки этой возможностью пользовать ся не рекомендуется, так как изменение параметров или режимов нарушает процесс настройки, при этом правильность расчета параметров регулятора не гарантируется.
2. Необходимо проявлять осторожность при использовании режима АВТОНАСТРОЙКА. Использовать его рекомендуется только тогда, когда на объекте допустимы колебания технологического параметра относительно уставки. Если работа в таком режиме недопустима, параметры ПИДрегулятора следует задавать вручную (п. 7.2), исходя из априорной информации об инерционных свойствах объекта.
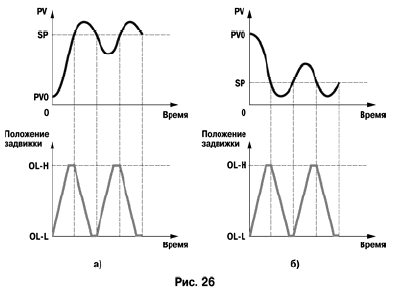
7.2. Ручная настройка
7.2.1. Если характеристики объекта регулирования заранее известны или требуется подстройка уже установленных значений параметров, пользователь вручную может установить параметры ПИД- регулирования:
Р - полосу пропорциональности регулятора XP;
I - постоянную времени интегрирования И;
d - постоянную времени дифференцирования Д;
7.2.2. Значения параметра P устанавливаются в единицах измерения входной величины в диапазоне от 0,1 до 999,9 для температурных датчиков (ТС и ТП), и от 0,001 до 9999 - для аналоговых.
Значения параметра I устанавливаются в секундах в диапазоне от 0 до 3999. При I = 0 прибор работает как ПД-регулятор.
Значения параметра D устанавливаются в секундах в диапазоне от 0 до 3999. При d = 0 прибор работает как ПИ-регулятор.
При I= 0 и d = 0 прибор работает как П-регулятор.
7.2.3. Для ручной настройки регулятора следует использовать методику, приведенную в Приложении Ж.
8. Эксплуатация
8.1. Общие сведения
8.1.1. После проведения операций п. 5.4.4, перевести прибор в режим РАБОТА. Прибор начнет управлять внешним ИМ в режиме АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕГУЛЯТОРОМ (п. 8.2.1).
8.1.2. Визуальный контроль за работой выходного устройства оператор может осуществлять по светодиодам К1 и К2, расположенным на передней панели прибора. В зависимости от типа выходных устройств, светодиоды работают поразному.
Для приборов с ВУ1 и ВУ2 ключевого типа светодиод сигнализирует о состоянии соответствующего ВУ: светится – «включено», не светится – «выключено».
Для приборов с ВУ1 аналогового типа и ВУ2 ключевого типа свечение светодиода К2 сигнализирует о срабатывании устройства компаратора, а длительность свечения светодиода К1 зависит от мощности выходного сигнала. При минимальном выходном сигнале 4 мА (0 В) светодиод К1 не светится, при дальнейшем увеличении мощности сигнала светодиод начинает мигать с частотой один раз в секунду, при сигнале 20 мА (10 В) – светится непрерывно.
8.1.3. В дальнейшем можно оставить прибор работать в автоматическом режиме (изменение уставки при этом допускается) или управлять прибором вручную с помощью кнопок на лицевой панели или по сети, либо комбинировать по мере необходимости режимы между собой (см. п. 8.2).
8.2. Регулирование
Прибор ТРМ212 может осуществлять регулирование в трех режимах: автоматическом, ручном и дистанционном.
8.2.1. Режим автоматического управления регулятором
8.2.1.1. В режиме автоматического управления регулятором выходной сигнал управления рассчитывается самим прибором, пользователю необходимо только выполнить настройку (см. п. 7), выставить значение уставки и запустить регулятор.
8.2.1.2. Для задания уставки (параметр SP) нажать и удерживать кнопку до появления на верхнем ЦИ надписи MENu, выбрать кнопками и меню LVOP, нажать кнопку. Повторным нажатиемперейти в режим Редактирования уставки (светится светодиод УСТ), кнопками иустановить нужное значение уставки на нижнем ЦИ, нажать.
Примечания.
1. В режиме РАБОТА уставку можно изменять кнопками или, затемдля записи в память. Если включено несколько режимов индикации (см. п. 6.2.6), предварительно кнопкойвыбрать режим редактирования уставки (светится светодиод УСТ).
2. Режим редактирования уставки доступен при значениях On параметров diS1 или diS3 группы DISP.
8.2.1.3. Запуск и остановку процесса регулирования можно произвести двумя способами:
а) изменением значения параметра r.S: RUN – регулятор работает, STOP – регулятор остановлен, светится светодиод СТОП.
б) изменением состояния ключа на дополнительном входе, если задействована соответствующая функция дополнительного входа (см. п.п.3.1.3, 6.2.1.1).
Примечание. Команды от дополнительного входа имеют приоритет над управлением кнопками. Например, запуск процесса регулирования путем установки параметра r.S в значение rUn не может быть осуществлен, если ключ разомкнут.
8.2.2. Режим дистанционного управления регулятором
8.2.2.1. При дистанционном управлении регулятором пользователь самостоятельно задает требуемый выходной сигнал регулятора с помощью компьютера через интерфейс RS-485.
Для осуществления дистанционного управления регулятором в приборе существуют два оперативных параметра:
• r.L («перевод прибора на внешнее управление»), допустимые значения: 0 – автоматический режим управления регулятором (см. п. 8.2.1); 1 – дистанционный режим (управление с помощью ПК);
• r.OUt («выходной сигнал регулятора»), допустимые значения: –1.000+1.000 для прибора с ВУ ключевого типа; 0.000...1.000 для прибора с ВУ аналогового типа.
8.2.2.2. При записи r.L=1 засвечивается светодиод RS, прибор прекращает регулирование и передает управление пользователю, который, задавая по RS485 значения параметра r.OUt, устанавливает задвижку в нужное положение.
8.2.2.3. Для прибора с ВУ ключевого типа в параметре r.OUt, задают количество процентов, на которое нужно переместить задвижку.
Внимание! Не путать с положением, в которое требуется установить задвижку.
При записи:
r.OUt = 1 прибору посылается команда на полное открытие задвижки,
r.OUt = - 1 прибору посылается команда на полное закрытие задвижки,
r.OUt = 0 - положение задвижки не изменяется.
В общем случае при записи:
r.OUt > 0 - задвижка открывается на (r. Out х100 %),
r.OUt < 0 - задвижка закрывается на (r. Out х100 %),
r.OUt = 0 - положение задвижки не изменяется.
8.2.2.4. Для прибора с ВУ аналогового типа в параметре r.OUt задают (в относительных единицах) положение, в которое требуется установить задвижку.
При r.OUt = 0.000 задвижка полностью закрыта; при r.OUt = 1.000 - полностью открыта.
8.2.2.5. При записи r-L= 0 светодиод RS гаснет, пользователь возвращает управление прибору, который начинает регулирование в автоматическом режиме по заданным установкам.
Примечания.
1. Параметры r-L, r.OUt доступны пользователю только через интерфейс RS-485.
2. При каждом включении прибора или его перезапуске по сети параметр r-L автоматически инициируется значением 0.
3. Для прибора с ВУ ключевого типа каждый раз перед записью r.OUt необходимо считать текущее значение этого параметра. Если оно не равно 0, то запись нового значения параметра не рекомендуется, поскольку это может привести к потере контроля над реальным положением задвижки.
8.2.3. Режим ручного управления регулятором
8.2.3.1. В режиме РУЧНОЕ УПРАВЛЕНИЕ пользователь с помощью кнопок на лицевой панели прибора, устанавливает задвижку в нужное положение. При этом блокируется все внешнее управление: регулирование в автоматическом режиме, в том числе запуск/остановка через ключ, команды дистанционного управления по RS-485.
Войти в режим РУЧНОЕ УПРАВЛЕНИЕ можно только из меню прибора, удерживая кнопки + . При входе в режим РУЧНОЕ УПРАВЛЕНИЕ засвечивается светодиод РУЧ, задвижка остается в положении, котором она была на момент входа в режим.
8.2.3.2. Для прибора с дискретными выходами:
а) с датчиком положения:
- на верхнем ЦИ отображается значение, измеренное на Входе 1 (PV1),
- на нижнем ЦИ - значение с датчика положения (PV2);
-б) без датчика положения:
- на верхнем ЦИ отображается значение, измеренное на Входе 1 (PV1) или, если inP2= in.t2 и CALC не равно GrAF, то - значение с Вычислителя (LUPV), нижний ЦИ не задействован.
Изменение положения задвижки производится нажатием кнопок, . При нажатии кнопки прибор посылает на ИМ сигнал на открытие задвижки, а при нажатии кнопки - на закрытие.
8.2.3.3. Для прибора с аналоговым ВУ:
- на верхнем ЦИ отображается значение, измеренное на Входе 1 (PV1) или, если inP2 = in.t2 и CALC не равно GrAF,то значение с Вычислителя (LUPV),
- на нижнем ЦИ - положение задвижки.
Кнопками и пользователь устанавливает на нижнем ЦИ значение, характеризующее положение задвижки, в диапазоне от 0 до 100 %. На нижнем ЦИ также будет отображаться текущее рассчитанное прибором положение задвижки, которое может отличаться от установленного ранее значения, поскольку задвижка не может мгновенно принимать заданное положение, а имеет фиксированую скорость перемещения.
Кнопками иможно задать новое положение задвижки до того как она перейдет в ранее заданное положение.
Выход из режима «Ручное управление» осуществляется длительным нажатием кнопки. Светодиод РУЧ гаснет, прибор переходит в режим «Программирование».
При этом прибор начинает работать в автоматическом или дистанционном режиме (в зависимости от значения параметра r?L, см. п. 8.2.2) в соответствии с заданными установками.
9. Техническое обслуживание
9.1. Обслуживание прибора в период эксплуатации состоит из периодического технического осмотра, а также поверки его метрологических характеристик.
9.2. Технический осмотр прибора должен проводиться обслуживающим персоналом не реже одного раза в шесть месяцев и включать в себя выполнение следующих операций:
• очистку корпуса прибора, а также его клеммников от пыли, грязи и посторонних предметов;
• проверку качества крепления прибора к щиту управления;
• проверку надежности подключения внешних связей клеммникам. Обнаруженные при осмотре недостатки следует немедленно устранить.
9.3. Поверка метрологических характеристик приборов должна проводиться не реже одного раза в 3 года по методике МИ30672007. При необходимости проводится юстировка TPM212 (см. Прил. Е).
9.4. При выполнении работ по техническому обслуживанию прибора необходимо соблюдать меры безопасности, изложенные в разделе 4.
10. Маркировка и упаковка
10.1. Маркировка прибора. На прибор наносятся:
• наименование предприятияизготовителя;
• обозначение прибора в соответствии с ТУ;
• обозначение класса точности;
• изображение знака утверждения типа СИ;
• изображение знака соответствия государственным стандартам;
• обозначение напряжения и частоты питания;
• год выпуска;
• штрихкод с информацией о приборе.
10.2. Упаковка прибора производится в соответствии с ГОСТ 23170. Тип упаковочной тары – потребительская, выполненная из гофрированного картона.
Приложение А.
Габаритные чертежи
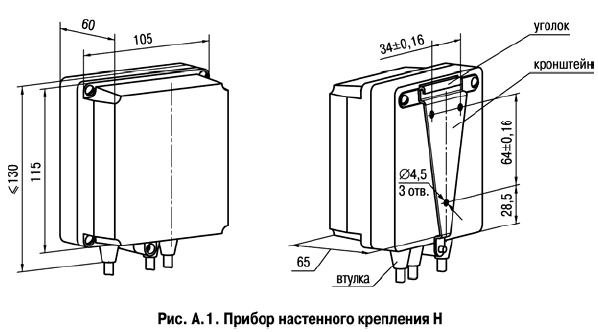
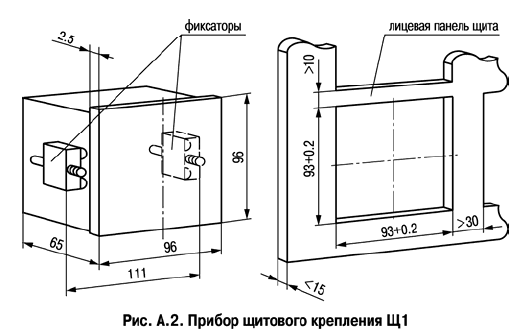
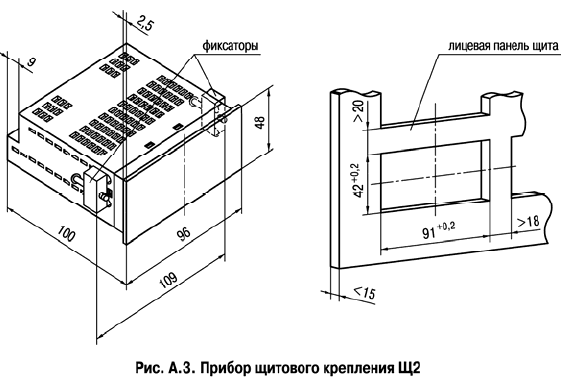
Приложение Б.
Схемы подключения
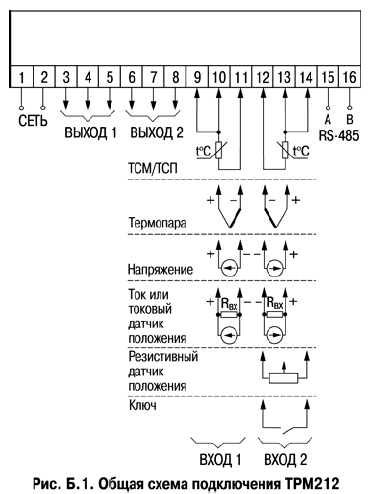
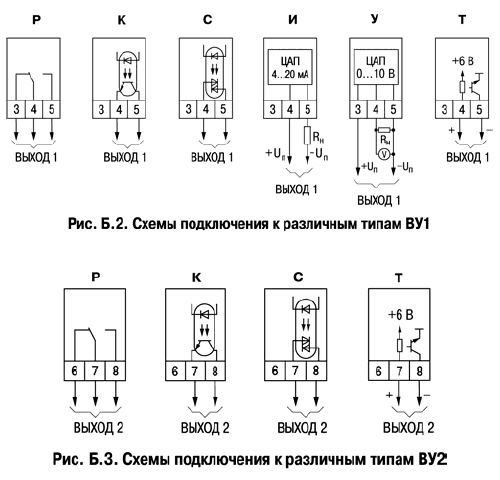
Приложение В.
Подключение ТС по двухпроводной схеме
В.1. Подключение ТС к прибору по двухпроводной схеме производится в случае невозможности использования трехпроводной схемы, например при использовании ранее проложенных монтажных трасс. При таком соединении показания прибора будут зависеть от изменения сопротивления проводов линии связи «датчики–прибор», происходящего под воздей ствием температуры окружающего воздуха.
В.2. Перед началом работы установить перемычки между контактами 9, 10 (для Входа 1) и 13, 14 (для Входа 2) выходного разъема прибора, а двухпроводную линию подключить соответственно к контактам 9 – 11 и 12 – 14.
В.З. Подключить к противоположным от прибора концам линии связи «датчик–прибор»вместо ТС магазин сопротивлений с классом точности не хуже 0,05 (например, Р4831).
В.4. Установить на магазине значение, равное сопротивлению ТС при температуре 0 °С (50 или 100 Ом в зависимости от типа датчика).
В.5. Включить питание прибора и через 15...20 с по показаниям ЦИ определить величину отклонения температуры от 0 °С для каждого измерительного канала.
В.6. Ввести в память прибора значения параметров «сдвиг характеристики» SH1 (SH2) для каждого канала, равное по величине показаниям прибора, но взятое с противоположным знаком.
В.7. Проверить правильность коррекции, для чего не изменяя значения сопротивления на магазине, перевести прибор в режим РАБОТА и убедиться, что при этом его показания равны 0±0,2°С.
В.8. Выключить питание прибора, отсоединить линию связи от магазина сопротивлений и подключить ее к ТС.
В.9. После выполнения указанных действий прибор готов к дальнейшей работе.
Приложение Г.
Программируемые параметры
Таблица Г.1
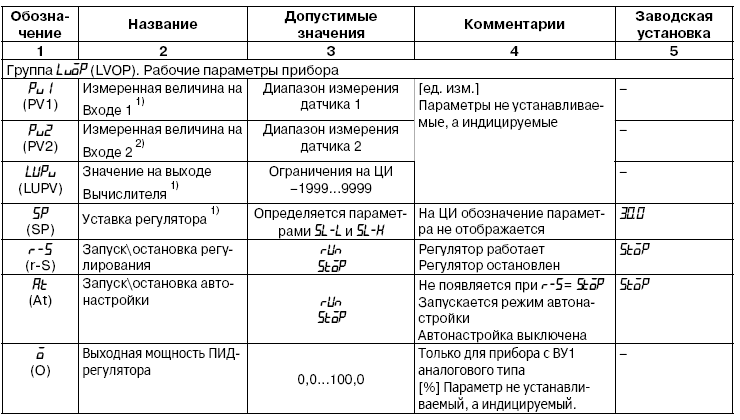
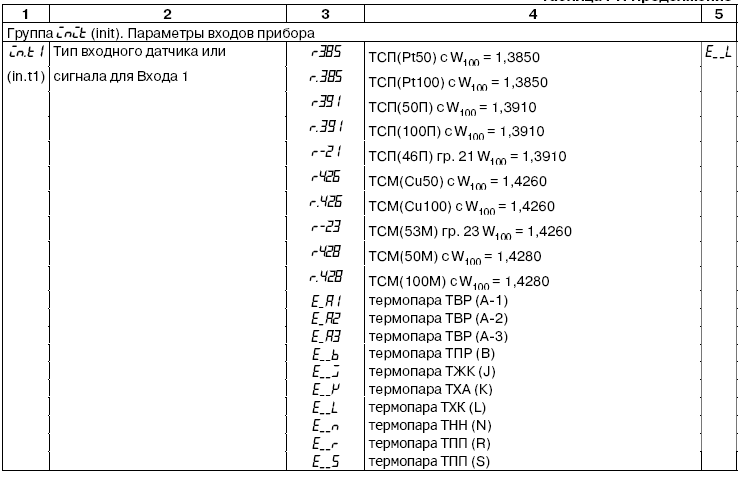
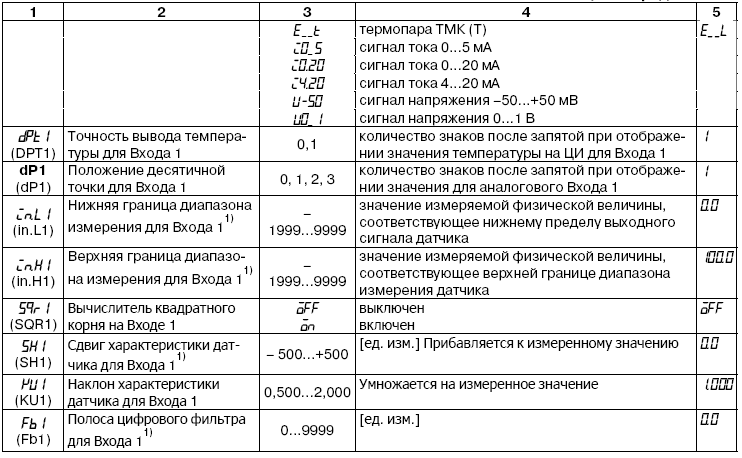
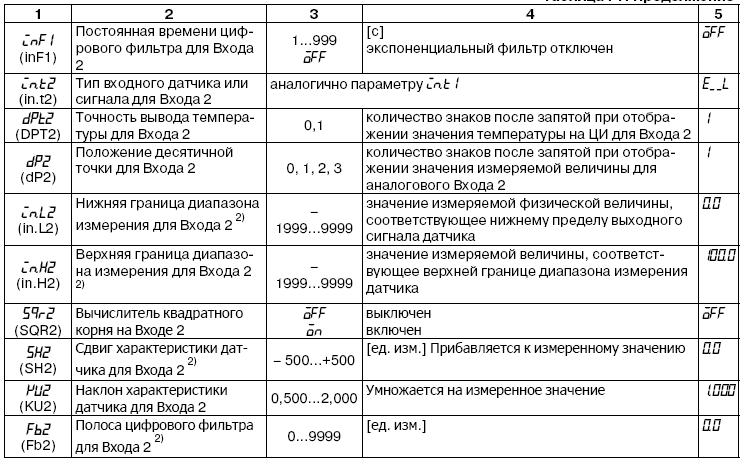
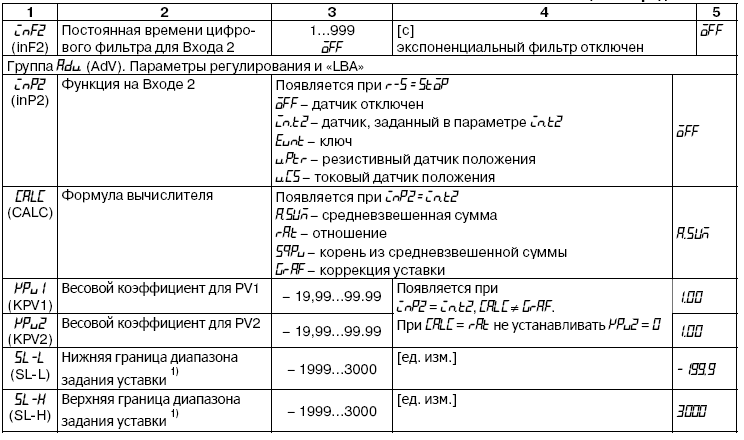
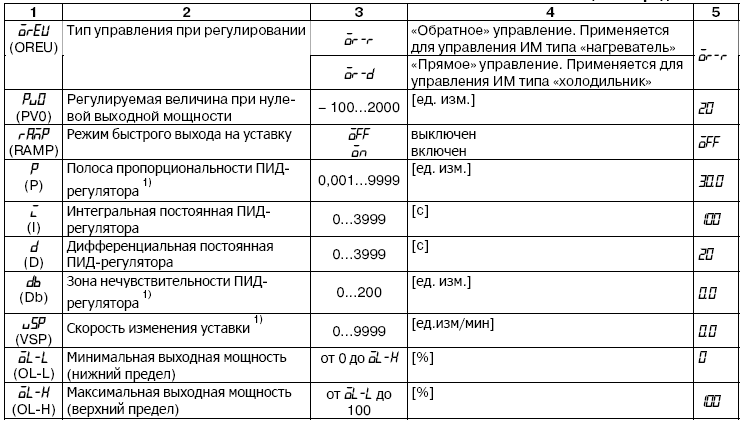
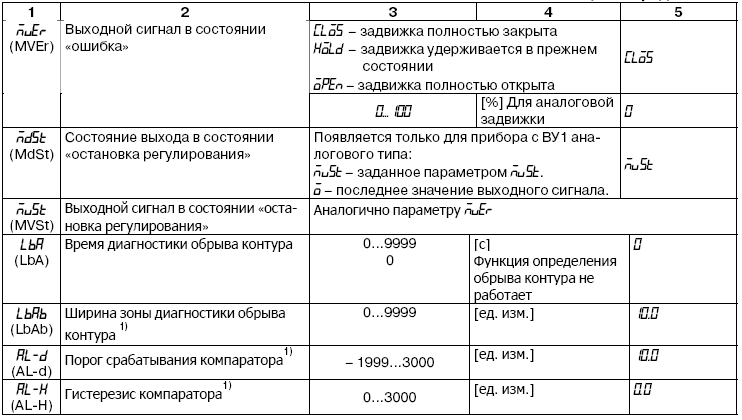
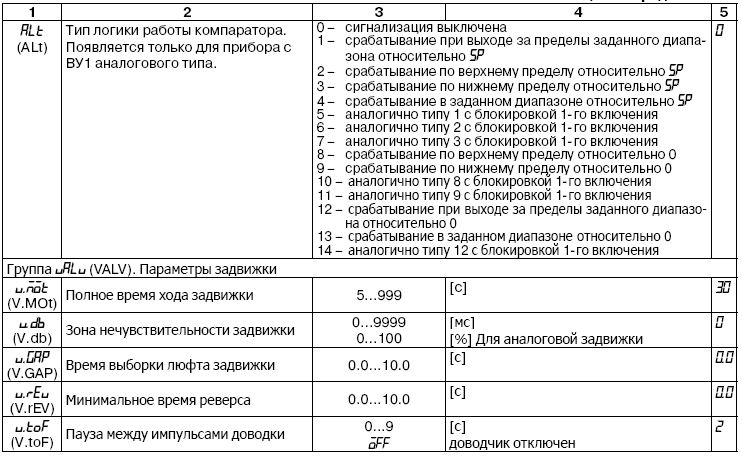
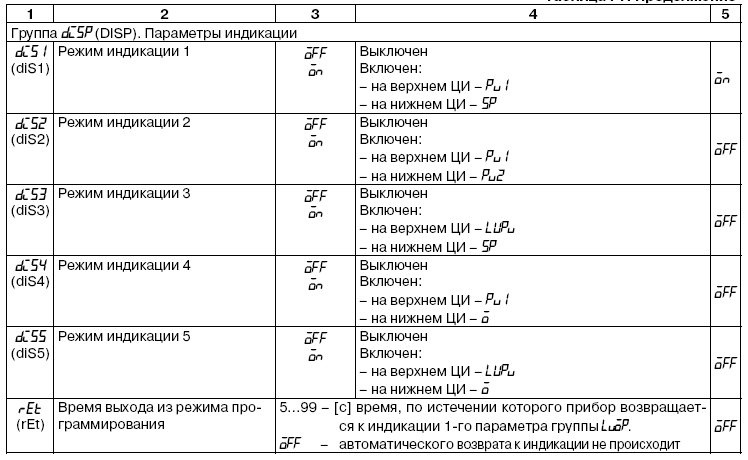
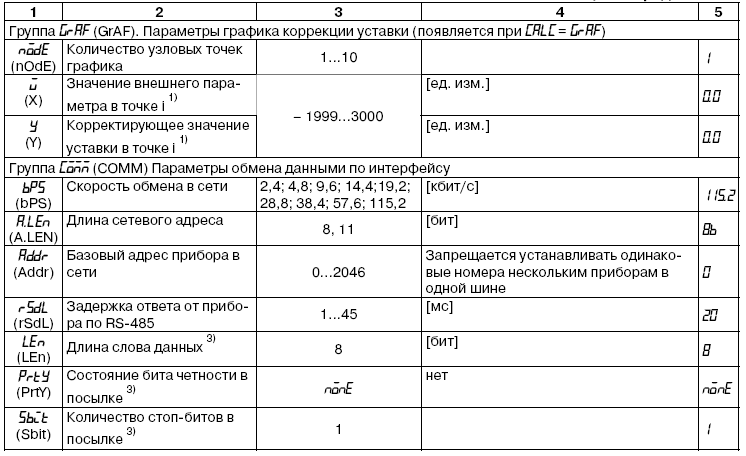
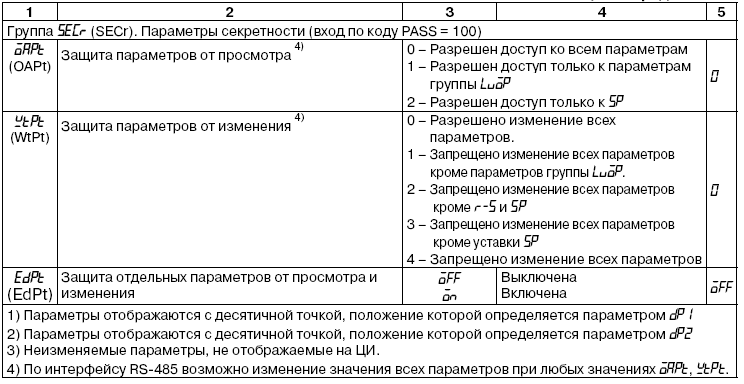
Приложение Д.
Возможные неисправности и способы их устранения
ТРМ212 может диагностировать следующие неисправности:
• Err.S – ошибка на входе;
• Err.P – ошибка датчика положения;
• Err.C – ошибка вычисления;
• Er.AD – ошибка внутреннего преобразования.
Примечания
1. Ошибка на входе возникает при выходе измеряемой величины за верхнюю или нижнюю границу диапазона измерения (см. табл. 3) или при выходе из строя датчика (обрыв или короткое замыкание ТС, обрыв ТП, обрыв датчика с унифицированным выходным сигналом напряжения, обрыв или короткое замыкание датчика, оснащенного выходным сигналом тока 4...20 мА). При коротком замыкания ТП на ЦИ отображается температура «холодного спая», равная температуре выходного разъема прибора. В случае обрыва или замыкания датчика (или линий связи) с унифицированным выходным сигналом тока 0...5 мА, 0...20 мА, замыкания датчика с унифицированным сигналом напряжения 0... 1 В на ЦИ отображается нижняя граница диапазона измерения (значение параметра in.L). После устранения неисправности работа прибора авто матически восстанавливается.
2. При работе с ТП ТПР(В) сообщение Err.S не выдается при температуре от 0 до 200 °С.
Если неисправность или предположительная причина в таблице не указаны, прибор следует отправить в ремонт.
Таблица Д1.
Возможные неисправности и способы их устранения
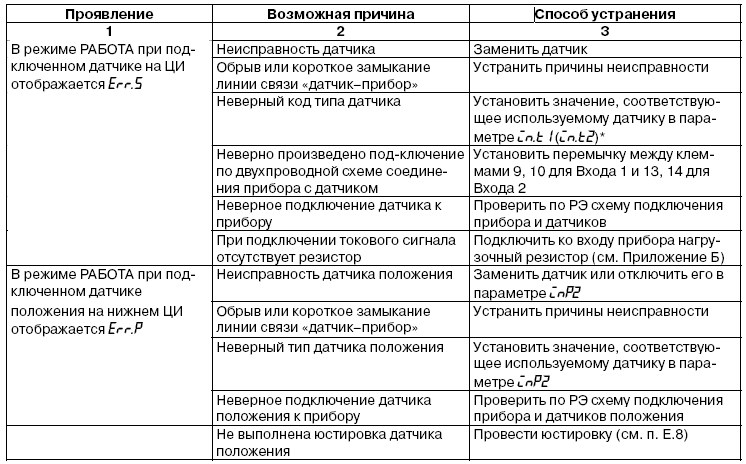
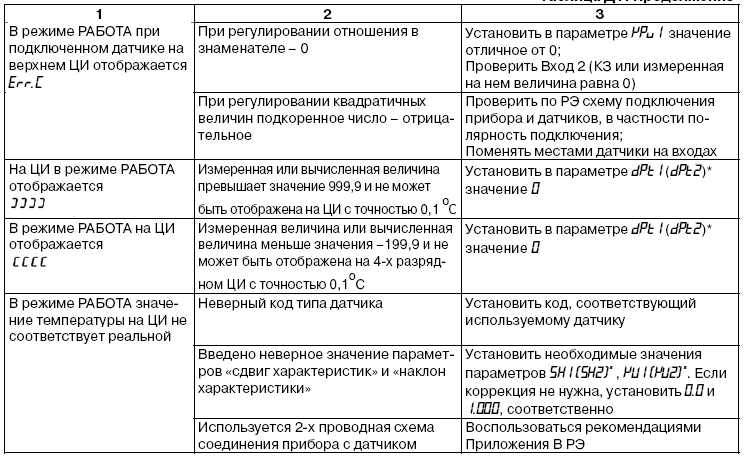
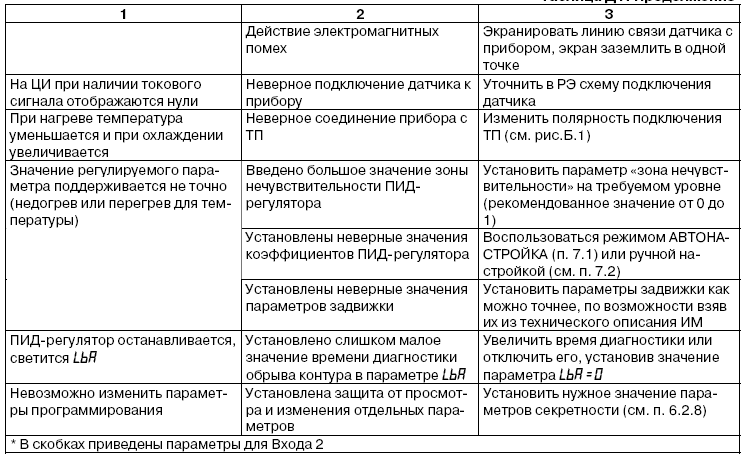
Изготовитель:
Поставщик:
Опубликовано на Яндекс.Дзен